
1. ì ëĄ
ììšìŽíì ë°(Maritime Autonomous Surface Ships, MASS)(IMO, 2019)ì ì ííčì±ìŽ 충ëííŒì 믞ìčë ìí„ì ìëłíë êČì MASSì ìêČ©ì ìŽìì 충ëì ííŒíêž° ìí íëì ëšìëĄì ì€ìíë€.
ì ë°ì 충ëííŒê° ê”ì íŽìŹêž°ê”Ź(International Maritime Organization, IMO)ì COLREGs 1972(1972, Convention on the International Regulations for Preventing Collisions at Sea)(IMO, 2009)ì ìê±°íìŹ ìíëë êČœì°, ì ííčì±ì íì êłŒì 충ëííŒ ì±êł” ëë ì€íšë„Œ êČ°ì í ì ìë ìŁŒìí ìČëëĄ ìì©ë ì ìë€. ìŽëŹí ì ííčì±ì ìŁŒìŽì§ íê°êłŒ ì ìì ìĄ°í©ì ìíŽì ìŁŒëĄ êČ°ì ëë êČìŒëĄ ìë €ì ž ìë€(Ă
ström, et al., 1976; Van Berlekom et al., 1972). ììžëŹ ì ííčì±ì ì íê¶(turning circle)ì ìŽì©íìŹ ë¶ìí ì ìëë°, ì íê¶ì ì ë°ì ì íì ìíŽì íì±ëë ì ë° ì€ìŹì 궀ì ì ì믞íë êČìŒëĄ, IMOì íì€ì ë°ìĄ°ìą
ì±ë„íê°(IMO, 2002)ì í ê°ì§ ìëšìŒëĄ ì ì©ëêł ìë€. ììžëŹ ì íê¶ì ì íìì ììčì ì íìì ìê°ì 충ëííŒì ìê”Źëë ìì ê±°ëŠŹì êČ°ì ì ìí„ì 믞ìčë êČìŒëĄ ìë €ì ž ìë€(Szlapczynski et al., 2017; Szlapczynski, et al., 2018).
ìŽì ê°ìŽ, ì ííčì±ì ì íì ìí 충ëííŒì ìí„ì 믞ìčë êČìŒëĄ ìë €ì ž ììŒë, ì ííčì±ìŽ 충ëííŒì 믞ìčë ìí„ì ìëłì êŽí ì°ê”Źë ë돞 ì€ì ìŽë€. ëłž ì°ê”Źììë ë€ìí íê°êłŒ ì ìì ìĄ°í©ìŒëĄ êŽìžĄë ì íê¶ì ìŽì©íìŹ ì ííčì±ìŽ 충ëííŒì 믞ìčë ìí„ì ìëłíìë€. ìŽëŹí ìëłì ì”ìą
ëȘ©ì ì, ìêČ©ìŒëĄ ì ìŽëë MASSì 충ëííŒë„Œ ìí êČìŽë€.
MASSë ìì€(level) 1ë¶í° ìì€ 4êčì§ ë€ ìì€ìŒëĄ ê”Źë¶ëìŽ ìë€. ìì€ 1ì íìĄŽ ì ë°ì ìëí ìì€ìŽêł , ìì€ 2ë íìĄŽ ì ë°ì ìëí ìì€êłŒ ìëì ìŽê° íŒí©ë ìì€ìŽë©°, ìì€ 3ì ìëíì ììšíê° íŒí©ë ìì€ìŽêł , ìì€ 4ë ìì ììšíë ìì€ìŽë€(ClassNK, 2020; DNV-GL, 2018; Rolls-Royce plc, 2016; VTMIS, 2020). ê”ëŽìžì ìž ê°ë°ëȘ©íë êž°ìĄŽ ì ìž ì ë°(ìŹëìŽ ì ìŽíë ì ë°)ì ìêČ©ì ìŽ ì„ìčë„Œ ë¶ê°íìŹ ìêČ©ìì ì ìŽ ê°ë„í ìì€ 2ì ìì€ 3 ìŹìŽì ìë€(ë
ž ë±, 2021; ì, 2021). ìì€ 2ì 3 ìŹìŽìì ìê”Źëë ìŁŒì êž°ì ì€ íëë ìêČ©ìŒëĄ MASSë„Œ ìì íêČ ìĄ°ìą
íë êČìžë°, ìŽë„Œ ìíŽ MASSì ë€ë„ž ì ë° ìŹìŽì 충ëì ë°ëì ííŒ ëìŽìŒ íë€. ììžëŹ MASSì 충ëìŽ ìë°©ëêž° ìíŽìë ë€ì ë€ ëŹžì ì ëí íŽêČ°ìŽ íìíë°, 1) ì ííčì±ì ìí 충ëë°ì íêČœêłŒ ìĄ°ê±Žì ìëł, 2) 충ëìŽ ë°ìíê±°ë ë°ìíì§ ìì íêČœêłŒ ìĄ°ê±Ž(ìŽêČì ìžêł”ì§ë„ì ì ì©ëêž° ìí êČ), 3) 충ëì ììžĄ ë°©ëČ, 4) 충ëì ííŒ ë°©ëČ.
ëłž ì°ê”Źë ìì 1)íì êŽí êČìŒëĄ, ì ì„ 161 믞í°ì íëŹŒì ì ëí 4 ìì ë ìí ëȘšëžì ìŽì©íìŹ 4ìą
ì ìêłŒ 6ìą
ìë „ì ìĄ°í©ì ëí ì ííčì±ìŽ 충ëì 믞ìčë ìí„ì íê°íìë€. ììžëŹ ìĄ°ì°ìí©ì ë°ë„ž ìí„ì 4ìą
ì ìĄ°ì°ìí© ìë늏ì€ë„Œ ìŽì©íìŹ ëčê”íìë€. ëłž ì°ê”Źìì ì ìë ë°©ëČì MASSì ìêČ©ì ìŽìì 충ëííŒë„Œ ìí íëì ìëšìŒëĄ ì êł”ë ì ìì êČìŒëĄ êž°ëëë€.
2. ì°ê”Ź ì ê·Œ ë°©ëČ
2.1 ì ííčì±ìŽ 충ëííŒì 믞ìčë ìí„ì íê° ê°ë
ì ííčì±ìŽ 충ëííŒì 믞ìčë ìí„ì íê° ê°ë
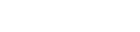
ì, ëłžì (OS)êłŒ íì (TS) ìŹìŽ(OS-TS)ì 90ë ê”ì°šìí©ì ìŽì©íìŹ ì 늜íìë€. Fig. 1ì x-y íë©Ž ìąíì ì€ëȘ
ë íê° ê°ë
ì ëíëž êČìŒëĄ, 귞늌ì ëíëž êž°ížë ë€ì ê°ìŽ ì ìë êČìŽë€.
âą ÏOS, ÏTS : ëłžì ì ìŽêž° ì ìë°©ì(0ë)ì íì ì ìŽêž° ì ìë°©ì(270ë)
âą TC*, ëłžì ì ì íê¶(êČì ìì ì)
âą TC, ëłžì ìŽ ì¶©ëííŒë„Œ ìíŽ ì íí 궀ì (ì ìì íž)
âą O1(t=0), O2(t=1), O3(t=2): ììëĄ ì€ ìê° t=0, t=1, t=2 ê°ê°ì ëí OSì ììč
âą T1(t=0), T2(t=1), T3(t=2): ììëĄ ì€ ìê° t=0, t=1, t=2 ê°ê°ì ëí TSì ììč
âą C, ë ì ë°ì 충ë ìì ì§ì
âą O, ì íê¶ì ê°ì ì€ìŹì (0,0)
âą R, ì íê¶ì ë°êČœ(m)
âą RD, OS-TS ìëê±°ëŠŹ(m)
âą RDmin, ì í í ì”ìê° ë OS-TS ì”ììëê±°ëŠŹ(m)
⹠Κ, OSì ì ìë„Œ êž°ì€ìŒëĄ ìžĄì í OS-TS ìëë°©ì (0 †Κ < 360)
Fig. 1ì ëíëž ì¶©ëííŒ ìí©ì ë€ìêłŒ ê°ë€. OSë O1-O2 êČœëĄë„Œ ìŽëí í O2ìì ì ííìŹ O3 ì§ì ì ëì°©íë€. TSë T1-T2 êČœëĄë„Œ ìŽëíìŹ T3ì ëì°©íë€. ê·ž êČ°êłŒ, OSë O3-T3 ê”Źê°ì íŽëčíë ì”ììëê±°ëŠŹ RDmin, ë§íŒ TSì ë¶ëŠŹëìŽ ì¶©ëì ííŒí ì ìë€. ë§ìœ OSê° O2ìì ì ííì§ ëȘ»íêł C ì§ì ì ì ì°š ê·Œì íë©Ž 충ëì ê°ë„ì±ì ìŠëëë€.
ìì ì€ëȘ
ë ì íì ìí 충ëííŒê° êł ë €ëë êČœì°, 뚌ì ì íìĄ°ìą
ì ììììč O2ì êČ°ì ìŽ íìíë€. ìŽì êŽíŽìë ì ë° ëë©ìž(Ship domain) ê°ë
ìŽ ëì
ë ë€ìì êŽë š ì°ê”Źê° ëłŽêł ëìŽ ììŒë, ì íìĄ°ìą
ììììčì êŽí íì ì êČ°ì ë°©ëČì ìì§ íêłì ëłŽêł ëë° ìë€(Fujii, 1971; Szlapczynski et al., 2017; Szlapczynski, et. al., 2018). ê·ž ìŽì ë, COLREGsìë ì”ì ì ì íìĄ°ìą
ììììčì ìê°ì êŽíŽì ëȘ
ìëìŽ ìì§ ìêł , ì ë°ì COLREGsì ìíŽì ê·ì í ì ìë ë€ìí íêČœìŽ ë°ìíêž° ë돞ìŽë€(Cockcroft, 2003). ííž, Coldwell(1983)êłŒ Szlapczynski ë±(2017, 2018)ì ìíë©Ž ì”ì ì ì íìĄ°ìą
ììììčë, âOSì ëłžì ëë©ìžìŽ ìčšíŽëì§ ìë 3.25LOAì ìì ê±°ëŠŹê° í볎ë ì ìë ììčâëĄ ì ìë ë° ìë€. ìŹêž°ì, 3.25LOAë ëłžì ì ì„(Length of Overall, LOA)ì 3.25ë°°ì íŽëčíë ê±°ëŠŹë„Œ ì믞íë€.
ííž, íìŹêčì§ ëłŽêł ë ì°ê”ŹêČ°êłŒë„Œ ì°žêł íë êČœì°, MASSì ìêČ©ì ìŽìì 충ëííŒì ì”ì ììčë OS-TS ìëê±°ëŠŹì OS ìŽëìê°ì ìíŽì êČ°ì ë ì ìë êČìŒëĄ ìë €ì ž ìëë°(Park et. al., 2016; Yim, 2012; Yim et al., 2013; Yim et al., 2018), ê·ž ìŽì ë ë€ìêłŒ ê°ë€.
âą ìČ«ì§žë ì”ê·Œì ìŹì ê±°ëŠŹ(Closest Point of Approach, CPA)âą ì ì”ê·Œì ìŹì ìê°(Time to CPA, TCPA)ì ê°ë
(Bowditch, 2019)ìŽ êł ë €ë êČìŒëĄ, ìŽ ê°ë
ì ì ìŒ ê°êčìŽ ê·Œì ììčìì ìëê±°ëŠŹì ìê°ì íê°ì ìíŽì 충ëííŒ ìŹë¶ë„Œ êČ°ì íêž° ìí êČìŽë€.
âą ë짞ë ìêČ©ì ìŽì íčì§ìŽ êł ë €ë êČìŒëĄ, ìêČ©ì ìŽë ìêČ©ì§ìì MASSë„Œ ì ìŽíêž° ë돞ì ë€ìí ì§ì°(latency)ìŽ ë°ìí ì ìêł , ë€ìí ì§ì°ì ìíŽì ìëê±°ëŠŹì ìê°ì ëłëë ì ìë€. ê·žëì MASSì ìêČ©ì ìŽìì 충ëííŒë„Œ ìí ì”ì ììčì êČ°ì ìë ì§ì°ì ìí ìëê±°ëŠŹì ìê°ì ëłíê° êł ë €ëìŽìŒ íë€.
âą ì
짞ë ì ííčì±ìŽ êł ë €ë êČìžë°, 충ëííŒë„Œ ìí ì”ì ììčë ì ííčì±ì ë°ëŒ ëłí ì ìë€. ì íê¶ì ë°êČœìŽ íŹë©Ž ì í 궀ì ì 컀ì§êł , ìŽì ë°ëìž êČœì°ë ììì§ë€. ì íì ìí 충ëì ìŽ ì íê¶ ììì ë°ìíêž° ë돞ì ì ííčì±ì 충ëì ìí„ì 믞ìčë€.
ìì ëŽì©ì ìą
í©íë©Ž, ì”ì ì ì íìĄ°ìą
ììììčë ë ëłì(OS-TS ìëê±°ëŠŹì OSì ìŽëìê°)ì ìíŽì êČ°ì ë ì ìêł , ìŽë€ ë ëłìì ëłíë ì ííčì±ì ììĄŽíë€. ììžëŹ, ì ííčì±ì íì ê°ë(íê°)ì ì ìì ììĄŽíìŹ êČ°ì ë ì ìë€. ë°ëŒì ì ííčì±ìŽ 충ëííŒì 믞ìčë ìí„ì, ì”ììëê±°ëŠŹì ìŽëì ìê°ì ìíŽì ë¶ìë ì ìêł , ìŽ ë ì ì©ë íê°êłŒ ì ìì ìíŽì íê°ë ì ìë€.
ììžëŹ ëłž ì°ê”Źìì, ì”ììëê±°ëŠŹì ì”ììê°ì CPA/TCPAìë ìëĄ ë€ë„ž ìëŻžëĄ ìŹì©íìëë°, CPA/TCPAë ë ì ë°ìŽ ìœì€ì ìë „ì ì ì§íë©Žì ìëĄ í”ííë êČœì° ê°ì„ 짧ì ê±°ëŠŹì ìŽëì ìê°ì ì믞íë êČì(Olindersson and Janson, 2015)ì ë°íìŹ, ì”ììëê±°ëŠŹì ì”ììê°ì ì íì ìíŽì ë°ìëë ì”ìê±°ëŠŹì ìê°ì ì믞íë€.
2.2 ì€í ë°©ëČ
(1) ìí ëȘšëž
ì ííčì±ì êŽìžĄìë ì ì„ 161m íëŹŒì ì 4ìì ë ìíëȘšëžì ìŽì©íìë€(Chislett et al., 1965). ìŽ ìíëȘšëžì ë ì
ë „ ëłì(ëȘ
ë č íê°êłŒ ëȘ
ë č ìë)ì 4ìì ë ìŽëì êŽí ì¶ë „(surge velocity, sway velocity, roll velocity, yaw velocity, roll angle, surge position, sway position)ì ê°ëë€. ìŽ ìíëȘšëž ë°ìŽí°ì êŽí ììží ëŽì©ì Chislett ë±(1965)ì 돞íì ì€ëȘ
ëìŽ ìë€. Table 1ì ëȘšëž ì ë°ì ì ìì ëíëžë€.
(2) ì íê¶ ë°ìŽí° íë
ì íê¶ ë°ìŽí°ë ìíëȘšëžìì êŽìžĄë ì í 궀ì ìŒëĄë¶í° íëíìëë°, ì í 궀ì ì ë€ìêłŒ ê°ì 6ìą
íê°êłŒ 4ìą
ì ìì ìĄ°í©ì ëí ìŽ 24ìą
ì ìëĄ ë€ë„ž ííëĄ íëíìë€.
âą 6ìą
ì íê°: 5ë, 10ë, 15ë, 20ë, 25ë, 30ë
âą 4ìą
ì ì ì: 5knots, 10knots, 15knots, 20knots
(3) 충ëííŒ ì€í ë°©ëČ
충ëííŒ ì€íì ìíŽìë ì íìì ììčì êČ°ì ìŽ íìíë€. ëłž ì°ê”Źììë ë ì ë° ìŹìŽì ìëê±°ëŠŹê° 6.4LOAìž ì§ì ì ì íìì ììčëĄ ì íìë€. 6.4LOAë íëĄê° ì íë ìąì ìëĄìì ë ì ë° ìŹìŽì ìì ê±°ëŠŹëĄ ìë €ì ž ìë€.
ííž, Coldwell(1983)ì, âíì ì ìíŽì ëłžì ëë©ìžìŽ ìčšíŽëì§ ìë 3.25LOAâë„Œ 충ëííŒì ìê”Źëë ìì ê±°ëŠŹëĄ ëłŽêł í ë° ììŒë, ìŽëŹí ìì ê±°ëŠŹë ë í„ìë êž°ì ì ê°ë°ìŽ íìíšìŒëĄ, ëłž ì°ê”Źììë ì¶í ì°ê”ŹêłŒì ëĄ ëë€.
ììžëŹ, 충ëííŒ ì€íì ë€ì 4ìą
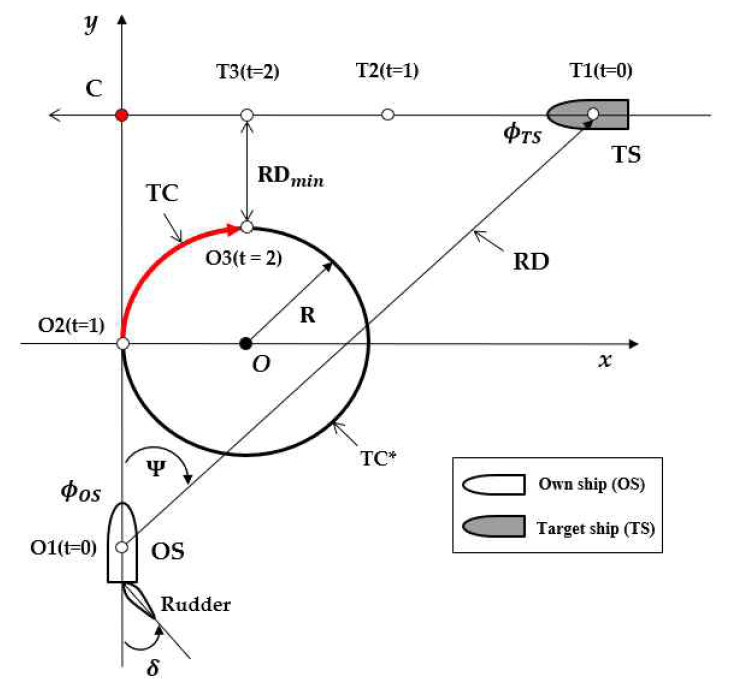
ì 충ëìĄ°ì° ìë늏ì€ë„Œ ìŽì©íìŹ ìĄ°ì°ìí©ì ë°ë„ž ì ííčì±ì ìí„ì ëčê” íê°íìë€.
âą ìëëŠŹì€ 1(S1): 0ë ì ìë§ëš(head-on) ìí©(Κ=0)
âą ìëëŠŹì€ 2(S2): 45ë ê”ì°š(crossing) ìí©(Κ=45)
âą ìëëŠŹì€ 3(S3): 90ë ê”ì°šìí©(Κ=90)
âą ìëëŠŹì€ 4(S4): 135ë ê”ì°šìí©(Κ=135)
Fig. 2ë ì€êłë ìë늏ì€ë„Œ ëíëž êČìŒëĄ, COLREGsì ìê±°íìŹ íì ì S1ì ì ìžíêł ì ì§ì ë°ìŽ ëë©°, S1ì ííŒëìì íì§ ìë ì ë°ìŒëĄ ê°ì íìë€.
2.3 íê° ë°©ëČ
ì ííčì±ìŽ 충ëííŒì 믞ìčë ìí„ì íê°ë OS-TS ìëê±°ëŠŹì OSì ìŽëìê°ì ìŽì©íìŹ ìííìë€. 뚌ì , OS-TS ìëê±°ëŠŹ RDë ë€ìêłŒ ê°ìŽ ëíëŒ ì ìêł ,
ìŹêž°ì xOS, yOS, xTS, yTSì OSì x-ì¶êłŒ y-ì¶ ê° ê·žëŠŹêł TSì x-ì¶êłŒ y-ì¶ ê° ê°ê°ì ë€ì ê°ìŽ ëíëž êČìŒëĄ, ìŽë€ ìąí ê°ì ìê° t-1ììì ììčê° ìê° tììì ììčì ëì ë êČìŒëĄ, ìŽë€ì ë€ì ê°ìŽ ìž ì ìë€.
(2)
ìŹêž°ì âłxOS, âłyOS, âłxTS, âłyTSì ìíìê° tsëì ëłíë OSì TSì ìąí ê°ì ëíëž êČìŒëĄ, ìŽë€ì ë€ì ê°ìŽ ííë ì ìë€.
(3)
ìŹêž°ì ÏOSì ÏTSë OSì TSì ì ìë°©ìë„Œ ê°ê° ëíëŽêł , ÎœOSì ÎœTSë OSì TSì ì ìì ê°ê° ëíëŽë©°, tsì 0.5ìŽëĄ ì íìë€. OS-TSì ìëê±°ëŠŹ RDì ëí ì”ììëê±°ëŠŹ RDmin ì RDmin ì íê· ê° R D ÂŻ min
ìŹêž°ì nvariableì íê· í ëì ëłìì ìë„Œ ëíëžë€. ììžëŹ, OSì ìŽëìê° Tì ë€ì ê°ìŽ ëíëŒ ì ìë€.
ìŹêž°ì nì ìí ìë„Œ ëíëžë€. ê·žëŠŹêł OS ìŽëìê°ì ì”ììê° Tminì RDmin ìŽ ìŁŒìŽì§S ëì ìê°ìŒëĄ êŽìžĄë ì ìëë°, TminêłŒ Tminì íê· ìê° T ÂŻ min
3. ì€í ë° êČ°êłŒ
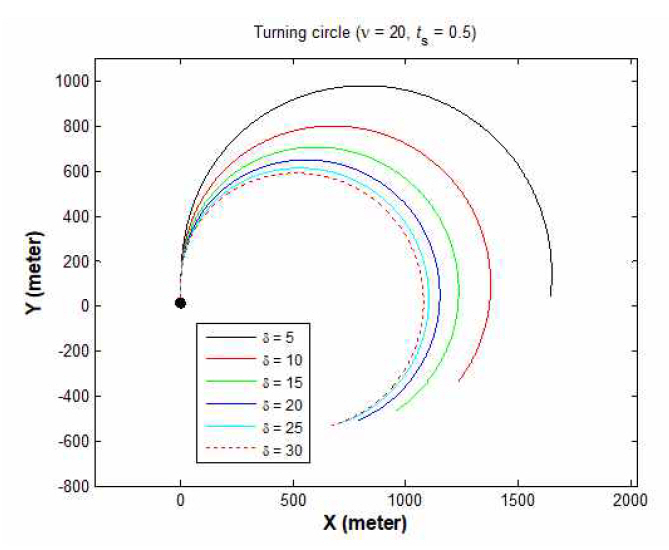
3.1 ì í ì럏ë ìŽì êČ°êłŒ
Fig. 3ì ììč ì럏ë ìŽì
ìì ìŒì í ìê°ëì êŽìžĄë ì íê¶ì ëíëž êČìŒëĄ, ìŽêČì 6ìą
íê° ê°ê°ì ëíŽì êŽìžĄë êČìŽë€. ì íê¶ì ì íìì ììč(êČì ì ì)ë„Œ ì€ìŹìŒëĄ ìŒì í ë°êČœì ê°ë êČìŒëĄ 볎ìžë€.
3.2 ì ííčì±ìŽ 충ëííŒì 믞ìčë ìí„ì íê° êČ°êłŒ
ì ííčì±ìŽ 충ëííŒì 믞ìčë ìí„ì, 4ìą
ìë늏ì€ëł 6ìą
íê°êłŒ 4ìą
ì ìì ìĄ°í©ì ëí ììč ì럏ë ìŽì
êČ°êłŒë„Œ ìŽì©íìŹ ë¶ìíìë€. ììžëŹ íê°êČ°êłŒë ë ë°©ëČìŒëĄ ë¶ìíìëë°, íëë ë ì ë° ìŹìŽì ìëì ìž ììčêŽêłë„Œ ê°ìííìŹ ë¶ìí êČìŽêł , ë€ë„ž íëë ìê°ì ë°ë„ž ë ì ë° ìŹìŽì ìë ê±°ëŠŹë„Œ ê°ìííìŹ ë¶ìí êČìŽë€.
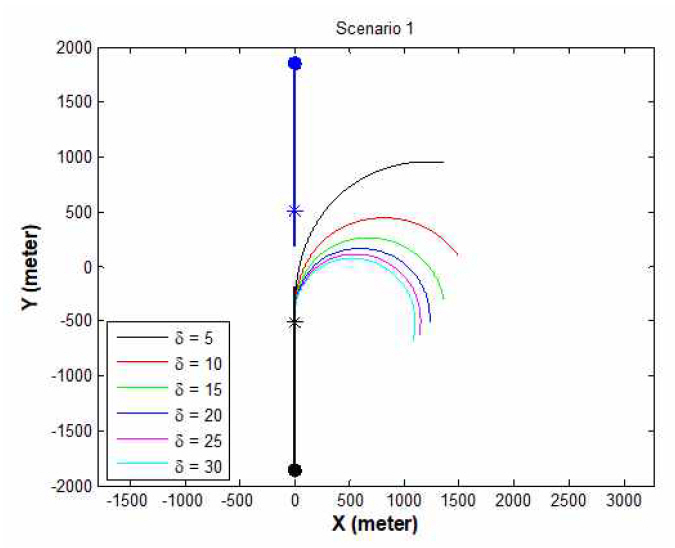
ìëëŠŹì€ 1
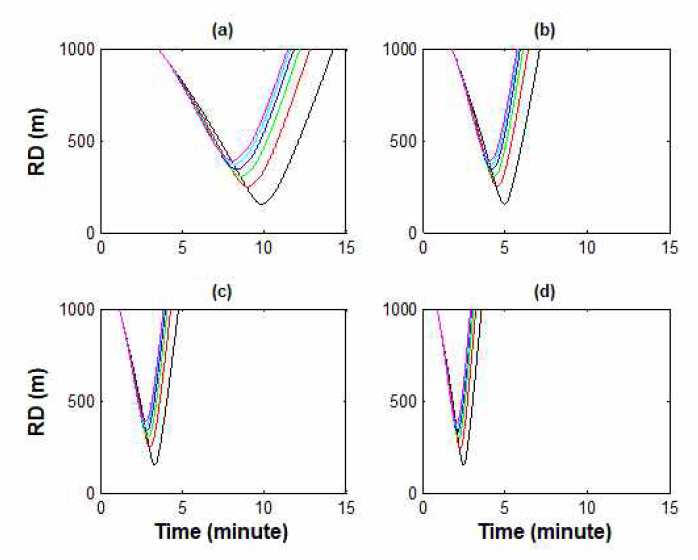
Fig. 4ë ìëëŠŹì€ 1(Κ = 0)ìì 6ìą
íê°ì ëí 충ëííŒ ê°ìí êČ°êłŒ ì€ íëì ìíì ëíëž êČìŒëĄ, ì ìì ëłžì êłŒ íì ëȘšë 5 ë
žížëĄ êł ì í êČìŽë€. êČì ì ìì ìêłŒ ꞎ ì€ì ì OSì ìŽêž°ììčì êČœëĄë„Œ ëíëŽêł , ìČì ìì ìêłŒ ì€ì ì TSì ìŽêž°ììčì êČœëĄë„Œ ëíëžë€. ìì€í
ëŠŹíŹ ë§íŹ(*)ë 6.4LOAì OS-TS ìëê±°ëŠŹ(RD)ê° ëë ì§ì ì ëíëž êČìŒëĄ, OSë ìŽ ì§ì ìì ì íë„Œ ììíë€. ììžëŹ, 6ìą
ììŒëĄ ëíëž ìížë 6ìą
íê°ì ëí ì í궀ì ì ëíëžë€. íê°ìŽ ìììëĄ ì íê¶ì TSì ê·Œì ëšì ëłŒ ì ìë€.
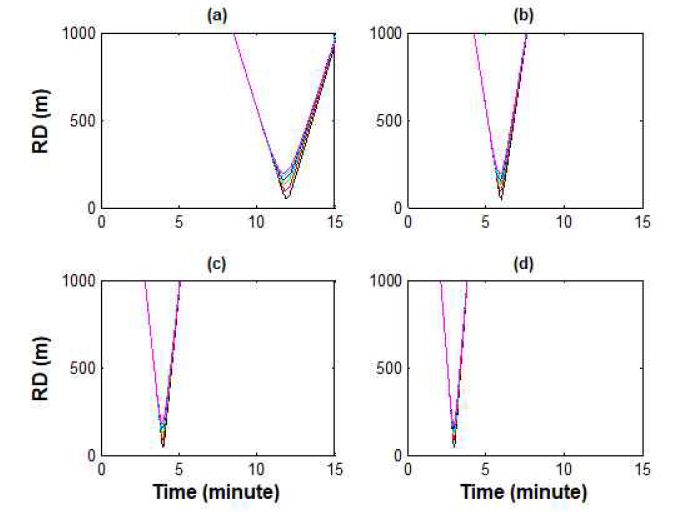
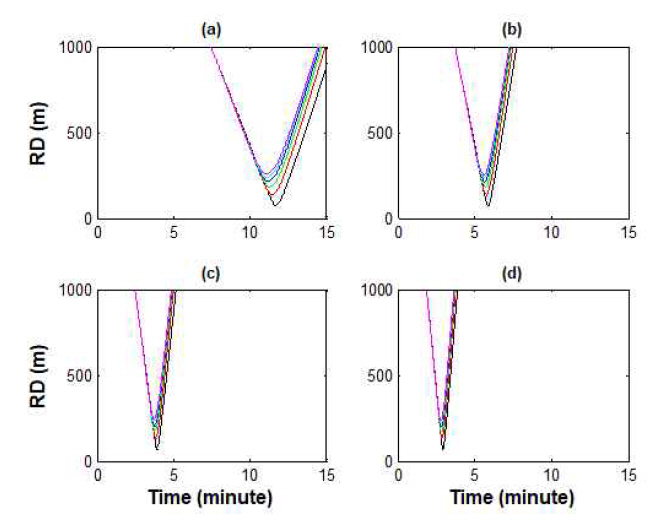
Fig. 5ë 4ìą
ì ì ê°ê°ì ëíŽì êłì°í RDë„Œ ëíëž êČìŒëĄ, (a), (b), (c), (d)ì ë€ ë°ì€ 귞늌ì 5ë
žíž, 10ë
žíž, 15ë
žížì 20ë
žížë„Œ ê°ê° ëíëžë€.
ìŹêž°ì ì°ëŠŹì êŽìŹì RDê° ì”ìê° ë ëì ì”ììëê±°ëŠŹì ì”ììê°ìŽë€. ì”ììëê±°ëŠŹë 4ìą
ìëëŠŹì€ ëȘšëìì ì ìŹí êČìŒëĄ 볎ìŽëë°, ì”ììê°ì ê° ìëëŠŹì€ ë§ë€ íì í ì°šìŽë„Œ 볎ìžë€. ì”ììëê±°ëŠŹì ì”ììê°ì ëí í”êł ê°ë€ì 3.2ì ì ì”ììëê±°ëŠŹ ë¶ìêłŒ 3.3ì ì ì”ììê° ë¶ììì ì€ëȘ
íë€.
ìëëŠŹì€ 2
Fig. 6ì ìëëŠŹì€ 2(Κ = 45)ìì 6ìą
íê°ì ëí 충ëííŒ ê°ìí êČ°êłŒ ì€ ìŒë¶ ìíì ëíëž êČìŒëĄ, ì ìì ëłžì êłŒ íì ëȘšë 5ë
žížëĄ êł ì í êČìŽë€. ìŹêž°ì, Fig. 6ì ëŹŒëĄ Fig. 8êłŒ Fig. 10ìì, ëłžì ì ì í 궀ì êłŒ íì ì 궀ì ìŽ êČčìčë ì§ì ìŽ ëłŽìŽëë°, ìŽêČì 충ëìŽ ë°ìí ì§ì ìŽ ìëëŒ ìê° êČœêłŒì ë°ëŒ ëíëë ëłžì êłŒ íì ì ììčìŒ ëżìŽë€. 충ë ìŹë¶ë ìê°ì ë°ë„ž ìëê±°ëŠŹë„Œ ëíëž Fig. 7, Fig. 9, Fig. 11ìì íìží ì ìë€.
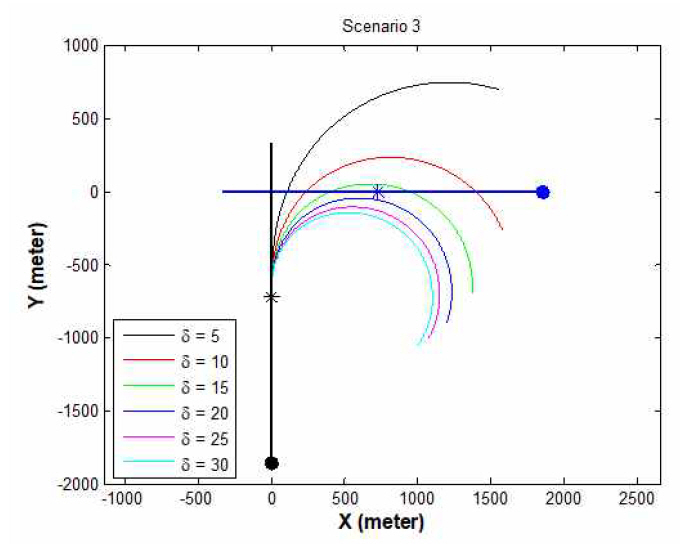
ìëëŠŹì€ 3
Fig. 8ì ìëëŠŹì€ 3(Κ = 90)ìì 6ìą
íê°ì ëí 충ëííŒ ê°ìí êČ°êłŒ ì€ ìŒë¶ ìíì ëíëž êČìŒëĄ, ì ìì ëłžì êłŒ íì ëȘšë 5ë
žížëĄ êł ì í êČìŽë€. ììžëŹ Fig. 9ë 4ìą
ì ì ê°ê°ì ëí RDë„Œ ëíëžë€. ë 귞늌ì ì믞ë ìì ë 귞늌(Fig. 5ì 6)êłŒ ëìŒíë€. ë¶ì êČ°êłŒ, ìëëŠŹì€ 3ììë ìì ìëëŠŹì€ 2ì ì ìŹí êČ°êłŒë„Œ 볎ììŒë ì”ììê°ì êČœì°ë ìëëŠŹì€ 2ì ë€ì ë€ë„ž êČ°êłŒë„Œ 볎ìë€.
ìëëŠŹì€ 4
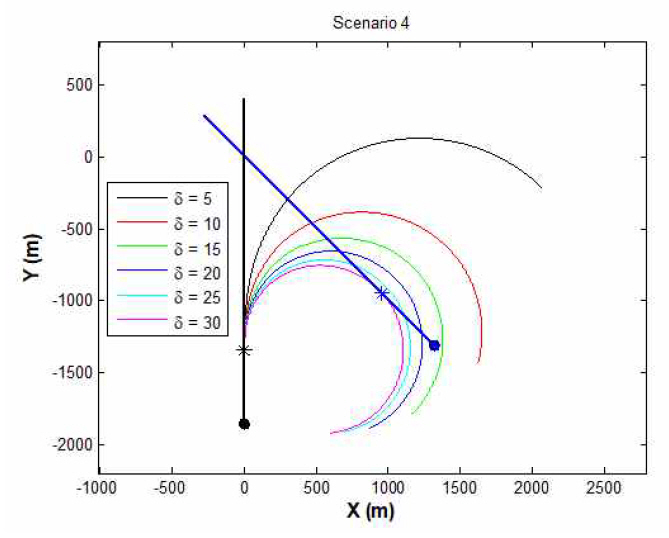
Fig. 10ì ìëëŠŹì€ 4(Κ = 135)ìì 6ìą
íê°ì ëí 충ëííŒ ê°ìí êČ°êłŒ ì€ ìŒë¶ ìíì ëíëž êČìŒëĄ, ì ìì ëłžì êłŒ íì ëȘšë 5ë
žížëĄ êł ì í êČìŽë€. ììžëŹ Fig. 11ì 4ìą
ì ì ê°ê°ì ëí RDë„Œ ëíëžë€. ë 귞늌ì ì믞ë ìì ë 귞늌(Fig. 5ì 6)êłŒ ëìŒíë€. ë¶ì êČ°êłŒ, ìëëŠŹì€ 4ììë ìì ìëëŠŹì€ 3êłŒ ì ìŹí êČ°êłŒë„Œ 볎ììŒë ì”ììê°ì êČœì°ë ìëëŠŹì€ 3êłŒ ë€ì ë€ë„ž êČ°êłŒë„Œ 볎ìë€.
3.3 ì”ììëê±°ëŠŹ ë¶ì
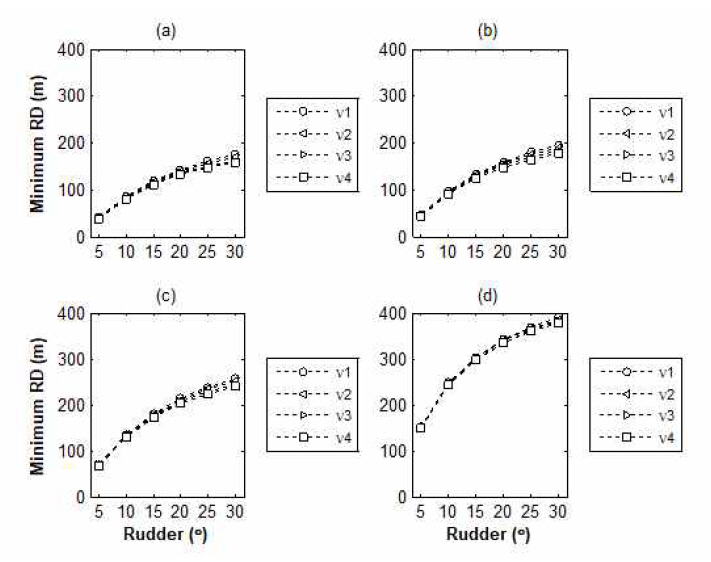
Fig. 12ë 6ìą
íê°êłŒ 4ìą
ì ìì ìĄ°í©ì ëí ì”ììëê±°ëŠŹì ëłíë„Œ ëíëž êČìŒëĄ, (a), (b), (c), (d)ì ë€ ë°ì€ 귞늌ì ìëëŠŹì€ 1ë¶í° ìëëŠŹì€ 4êčì§ë„Œ ê°ê° ëíëžë€. 4ìą
ìëëŠŹì€ ëȘšëìì, 6ìą
íê°ì ìí ëłíë í° êČìŒëĄ 볎ìŽë ë°ë©Ž, 4ìą
ì ìì ìí ëłíë ìì êČìŒëĄ 볎ìžë€.
Table 2ë 4ìą
ìë늏ì€ì 4ìą
ì ìì ìĄ°í©ì ëí ì”ììëê±°ëŠŹì íê· (íì€ížì°š)ì ëíëžë€. Fig. 12ì ë§ì°Źê°ì§ëĄ 4ìą
ìëëŠŹì€ ëȘšëìì 4ìą
ì ìì ìí ëłíë ìêČ ëíëŹìŒë, 4ìą
ì ìì ëí 4ìą
ìëëŠŹì€ ìŹìŽì ëłíë íŹêČ ëíëŹë€. ì”ììëê±°ëŠŹì íê· ê°ì ìëëŠŹì€ 1ì ì ì Îœ4 (20 knots)ìì ê°ì„ ìì 110.64 mëĄ ëíëŹêł , ìëëŠŹì€ 4ì ì ì Îœ1 (5 knots)ìì ê°ì„ í° 302.06 mëĄ ëíëŹë€. ì ë°ì ìŒëĄ, ì”ììëê±°ëŠŹë ìëëŠŹì€ 1ìì ìêČ ëłŽìŽêł , ìëëŠŹì€ 4ìì íŹêČ ëłŽìžë€.
ìì êČ°êłŒëĄë¶í°, ì”ììëê±°ëŠŹë ìĄ°ì°ìí©êłŒ íê° ëłíì ìŁŒëĄ ììĄŽíêł , ì ì ëłíì ë°ë„ž ìí„ì ìì êČìŒëĄ íìžëìë€.
3.4 ì”ììê° ë¶ì
Fig. 13ì 6ìą
íê°êłŒ 4ìą
ì ìì ìĄ°í©ì ëí ì”ììê°ì ëłíë„Œ ëíëž êČìŒëĄ, (a), (b), (c), (d)ì ë€ ë°ì€ 귞늌ì ìëëŠŹì€ 1ë¶í° ìëëŠŹì€ 4êčì§ë„Œ ê°ê° ëíëžë€. 4ìą
ìëëŠŹì€ ëȘšëìì, 6ìą
íê°ì ìí ëłíë ìì êČìŒëĄ 볎ìŽë ë°ë©Ž, 4ìą
ì ìì ìí ëłíë í° êČìŒëĄ 볎ìžë€. ìŽ êČ°êłŒë ììì ì€ëȘ
í ì”ììëê±°ëŠŹì ìëĄ ë€ë„ž êČ°êłŒìŽë€.
Table 3ì 4ìą
ìë늏ì€ì 4ìą
ì ìì ìĄ°í©ì ëí ì”ììê°ì íê· (íì€ížì°š)ì ëíëžë€. Fig. 13êłŒ ë§ì°Źê°ì§ëĄ 4ìą
ìëëŠŹì€ ëȘšëìì 4ìą
ì ìì ìí ëłíë íŹêČ ëíëŹìŒë, 4ìą
ì ìì ëí 4ìą
ìëëŠŹì€ ìŹìŽì ëłíë ìêČ ëíëŹë€. ì”ììê°ì íê· ê°ì ìëëŠŹì€ 1ì ì ì Îœ1 (5 knots)ìì ê°ì„ í° 12.03ë¶ìŒëĄ ëíë ë°ë©Ž, ìëëŠŹì€ 4ì ì ì Îœ4 (20 knots)ìì ê°ì„ ìì 2.21ë¶ìŒëĄ ëíëŹë€. ì ë°ì ìŒëĄ, ì”ììê°ì ìëëŠŹì€ 1ìì íŹêČ ëłŽìŽêł , ìëëŠŹì€ 4ìì ìêČ ëłŽìžë€.
ìì êČ°êłŒëĄë¶í°, ì”ììê°ì ìĄ°ì°ìí©êłŒ ì ì ëłíì ìŁŒëĄ ììĄŽíêł , íê° ëłíì ë°ë„ž ìí„ì ìì êČìŒëĄ íìžëìë€.
3.5 ì”ììëê±°ëŠŹì ì”ììê°ì ëčê”
4ìą
ìë늏ì€ì ëí 4ìą
ì ìêłŒ 6ìą
íê°ì ìĄ°í©ì ëíŽì êłì°í ì”ììëê±°ëŠŹì ì”ììê°ì ë¶ì êČ°êłŒë„Œ ììœíë©Ž ë€ìêłŒ ê°ë€.
âą ì”ììëê±°ëŠŹë ìŁŒëĄ íê°ì ììĄŽíìŹ ëłíêł , ì ìì ìí ëłíë ìë€. ìŽì ëŹëŠŹ, ì”ììê°ì ìŁŒëĄ ì ìì ììĄŽíìŹ ëłíêł , íê°ì ìí ëłíë ìë€.
âą ìëëŠŹì€ ëČížê° ìŠê°íšì ë°ëŒ(ìŠ, OS-TS ìëë°©ì(Κ)ê° ìŠê°íšì ë°ëŒ), ì”ììëê±°ëŠŹì íê· ê°ì ìŠê°íë ë°ë©Ž, ì”ììê°ì íê· ê°ì ê°ìíë€.
ìŹêž°ì, ì”ììëê±°ëŠŹì ì”ììê°ì íê°êłŒ ì ìì ìĄ°í©ìŒëĄ êŽìžĄë ì ííčì±ì ìŽì©íìŹ íê°í êČìì êł ë €í ë, ì ííčì±ì 충ëííŒì ìí„ì 믞ìčë êČìŒëĄ ê·êČ°ëìë€.
4. êČ° ëĄ
ëłž ì°ê”Źììë ììšìŽíì ë°ìì ì ííčì±ìŽ 충ëííŒì 믞ìčë ìí„ì íê°íêž° ìí ë°©ëČì ì ìíìë€. ìŽ íê°ë°©ëČì ë ì ë° ìŹìŽì ì”ììëê±°ëŠŹì ìŽëì ì”ììê°ì íê°ì§íëĄ ìŽì©í êČìŽë€. ì ìí ë°©ëČì, 4ìą
ìëëŠŹì€ ê°ê°ì ëíŽì 6ìą
íê°êłŒ 4ìą
ì ìì ìĄ°í©ìŒëĄ êŽìžĄë ì íê¶ì ìŽì©í ììč ì럏ë ìŽì
ì ìŽì©íìŹ êČìŠíìë€. íê° êČ°êłŒë ë€ìêłŒ ê°ë€.
âą ì”ììëê±°ëŠŹë ìŁŒëĄ íê°ì ììĄŽíìŹ ëłíêł , ì ìì ìí ëłíë ìë€.
âą ìŽì ëŹëŠŹ, ì”ììê°ì ìŁŒëĄ ì ìì ììĄŽíìŹ ëłíêł , íê°ì ìí ëłíë ìë€.
âą ë ì ë° ìŹìŽì ìëë°©ìê° ìŠê°íšì ë°ëŒ, ì”ììëê±°ëŠŹì íê· ê°ì ìŠê°íë ë°ë©Ž, ì”ììê°ì íê· ê°ì ê°ìíë€.
ëłž ì°ê”Źìì ì ìë íê° ë°©ëČì, ììšìŽíì ë°ì ìêČ©ì ìŽìì ì íê¶ì ìŽì©í 충ëííŒ ìêł ëŠŹëŹ ê°ë°ì ì ì© ê°ë„í êČìŒëĄ êž°ëëë€. í„í, ììšìŽíì ë°ì ìêČ©ì ìŽ ìì€í
ìì ì ìŽì§ì°ìŽ 충ëííŒì 믞ìčë ìí„ì ìëłì ëłž ì°ê”Źìì ì ìí ë°©ëČì ì ì©í ìì ìŽë€.



 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






