
1. 서 론
ICT 기술기반으로 하는 제4차 산업은 모든 산업분야에 변화를 요구하며, 이에 조선·해운분야에도 자율운항선박에 대한 관심증가와 기술개발 연구가 활발히 진행되고 있다. 자율운항 선박의 기술 중 하나는 항해사의 항해 당직업무를 대신하여 해상에서 조우 선박에 대한 충돌회피기술이다(Jung et al., 2019). 기존연구를 살펴보면 충돌회피 기술과 관련한 연구로서 Fujii et al.(1974)에서 충돌확률이 연구되었고, Hara et al.(1993)은 퍼지알고리즘을 이용하였으며, Hasegawa et al.(1989)와 Inoue(1998)은 환경스트레스를 이용하여 충돌위험성을 정량화하는 모델을 개발하였다. 이들 연구를 기반으로 Lee et al.(2015)은 선박의 위치와 DCPA(Distance to the Closest Point of Approach)와 TCPA(Time to the Closest Point of Approach)를 이용하여 충돌위험도를 산출하고 타력과 추력의 제어모델을 개발하였으며, Park et al.(2015)는 운항자 기반으로 침로 및 속력 변경에 의한 예측 위험도 산출 모델을 제시하였다. Yang(2004a)와 Yang(2005b)은 선박조종운동방정식과 타선의 속력과 침로에 대한 운동역학 방정식을 이용하여 근접상황에 적용 가능한 충돌회피지원 모델을 제시하였다. Yang(2006)은 가변 안전경계영역과 선박운동의 수학적 모델을 적용하여 속력을 고려한 선박충돌회피모델을 개발하였다. 또한 Im(2003), Im(2004a)와 Im(2004b)의 연구에서는 다중 선박이 조수하는 경우 차등 위험도를 계산하고 최종적으로 충돌위험도를 획일화하여 집단 선박 피항 모델을 개발하고 KT모델로 수치시뮬레이션 하여 검증하였다. Yoon et al.(2005)은 MMG 수학모델을 기반으로 Surge-Sway-Yaw-Roll 운동방정시과 퍼지이론을 이용하여 다수선박과 연속 조우시 충돌회피자동제어 연구를 수행하였으며, Kim et al.(2011)은 충돌위험평가에서는 COLREGs 항법을 고려해야함을 제시하고 조우선박의 상대방위를 측정하여 피항선 및 유지선을 식별하고 타원형 선박안전영역 모델을 이용하여 피항시점을 결정하는 알고리즘을 연구하였다. Song et al.(2011)은 베이지안 추정이론을 이용하여 충돌위험도를 알고리즘을 제시하였다. 한편 선박조종시뮬레이터를 이용하여 퍼지이론과 환경스트레스의 충돌위험을 비교한 연구 Son et al.(2009)와 조종운동 수학모델과 전자해도 기술을 접목하여 가상시스템을 구축하고 다양한 외력 조건하에서 선박조종시뮬레이터를 이용하여 조종 위험도의 객관적 평가 연구인 Yang et al.(2005)가 있다.
최근의 자율충돌회피 연구로 Cho et al.(2019)는 선박충돌 회피 시 타선의 속력과 침로의 불확실성을 반영하는 충돌확률 계산 알고리즘과 확률적 속도 장애물을 활용하여 확률론적 속도 장애물 알고리즘 및 COLREGs를 기반으로 하는 비용함수를 설계한 충돌회피 알고리즘 연구가 있으며, 선박충돌회피를 정량적으로 평가하기 위해 Nakamura et al.(2019)는 자선과 상대선박 사이의 상대거리와 방위변화율을 이용하여 선수와 선미 횡단에 대하여 위험수역, 주의수역 및 안전수역으로 선정하고 각각 벌점을 -2, -1 및 0을 부여하고 각 수역에 머문 시간으로 곱하고 이를 전체 시간으로 나눔으로서 선박조종 결과를 정량화 하였고, Woerner(2016)은 CPA에서 상대선박과 본선의 접촉각과 상대방위 및 DCPA를 기본점수로 하여 COLREGs 항법 적용여부에 따라 벌점과 가중치를 부여하여 정량화하는 연구를 수행하였다.
기존연구들을 분석한 결과 자동 충돌회피 알고리즘 및 자동제어를 수행한 이들 연구 결과는 컴퓨터를 이용한 임의적이고 주관적 평가만 수행하였는데 이들 연구를 객관적으로 평가하기 위한 연구는 미흡하였다. 세계적으로는 자율운항선박의 기술완성도를 높이기 위해 실 선박에 적용하는 전 단계로 선박조종시뮬레이터를 이용하고 있다. 또한 모든 선박이 자율운항선박이 되기 전까지는 사람과 자율운항선박이 공존할 수 밖에 없으므로 자동충돌회피 기술도 사람의 충돌회피와 유사하게 개발되어야 한다.
따라서 본 연구의 목적은 선박조종시뮬레이터(Full mission ship-handing simulator: FMSS)를 이용하여 자율운항선박의 충돌회피능력을 정량적으로 수치화하는 평가모듈을 개발하는 것이며, 이를 위하여 COLREGs에 대한 전문지식과 실무조선 경험이 많은 선박조종전문가들이 해상에서 선박 조우형태별 선박조종시뮬레이션을 실시한 후 그 결과 데이터를 평가요소별로 기술통계 처리하여 이를 기준으로 자율운항선박의 충돌회피능력을 평가할 수 있는 모델을 개발하는 것이다.
2. 기초자료 분석
2.1 선박조종 시뮬레이션을 이용한 평가절차 분석
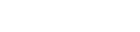
우리나라 해사안전법 제15조의 해상교통안전진단 및 동법의 시행지침에 의하면 수역 설정 및 변경, 수역내 시설물 건설 및 보수, 항만 또는 부두 개발 및 재개발과 해상교통안전에 영향을 미치는 사업을 수행할 경우에는 해상교통시스템 적정성 평가의 일환으로 선박 통항안전성을 평가하도록 규정하고 있다. 대부분의 선박 통항안전성 평가는 선박조종시뮬레이션을 이용하여 진단구역을 선박조종전문가가 시뮬레이션 한 후 그 결과의 위치, 선속, 침로 등의 기초 데이터를 분석하여 선박의 근접도, 여유제어력, 작업부하, 타 작동 및 선체운동 등을 계측하고 이를 기술통계 처리하여 충돌, 좌초 및 항로 침범 등의 충돌확률을 정량적으로 평가하고 또한 선박 조선자의 주관적 평가를 종합하여 최종적으로 안전성을 평가하는데 이를 도식화하면 Fig.1과 같다.
2.2 해상교통안전진단 기법 분석
해양교통안전진단의 통항안전성 평가의 목적은 항만 내의 선박 통항로가 선박 통항에 필요한 충분한 항로 폭을 확보하는지 여부, 선박 통항 방해물과 안전한 이격거리를 확보하는지 여부 및 부두 접이안시 충분하게 선박을 제어할 수 있는지 여부를 평가하기 위한 것이다. 평가 기법으로는 방해물 또는 선박간의 근접도 평가, 조종 선박의 타각과 기관 사용에 대한 여유 제어력 평가 및 조선자의 주관적 평가로 구성되어 있다. 근접도 평가는 방해물 또는 선박간의 최근접거리를 계측하여 평균거리와 표준편차를 이용하여 충돌확률이 10-4 이하가 되면 안전한 것으로 평가하며, 여유제어력은 평균 사용한 타각과 기관 사용량이 전타각과 전속 기관 사용의 50% 미만이 되면 안전한 것으로 평가하고 조선자가 조선 난이도를 7점도 평가하여 난이도가 -2(위험) 이하이면 불안전한 것으로 평가하여 종합적으로 평가한다.
2.3 국제해상충돌예방규칙 분석
해상에서 선박 간 충돌위험이 존재할 경우 국제사회에서 규정하고 있는 COLREGs를 적용하도로 IMO에서 규정하고 있으며 자율운항선박에 대한 별도의 규정이 제정 전까지 이 규정을 적용하여야 한다. 따라서 자율운항선박의 충돌회피능력 평가는 COLREGs의 항법을 얼마나 올바르게 적용하느냐 이므로 평가요소를 식별하기 위해서는 이에 대한 분석이 필요하다. COLREGs은 시계에 따라 모든 시계항법, 상호시계항법 및 제한시계항법으로 구분하고 있다. 시정이 좋은 상호시계의 항법은 모든 시계의 항법 일부와 함께 적용하는데 우선 모든 시계의 항법의 주요항법은 제6조 안전속력 준수, 제7조 충돌위험 및 제8조 충돌회피동작이며 이를 요약하면 상황에 적합한 안전속력을 준수하고 선박간 충돌위험이 존재하는 경우 충분히 여유 있는 시기에 상대방이 인지할 수 있도록 명확하게 침로와 속력을 변경하여 피항하고, 침로만 변경시 대각도 변침하고 또 다른 접근상태 형성하지 않도록 안전한 이격거리를 유지하여 통항하도록 하고 있다. 상호시계의 주요항법은 선박간 조우형태를 추월, 마주침 및 횡단상태로 구분하고 피항선과 유지선 의무를 부여하는데 피항선은 우현변침하여 상대선박의 진로에서 멀리 떨어지도록 피항하고, 유지선은 선수침로와 속력을 유지하나 피항선의 조치가 의심스러운 경우 조기회피 동작을 취할 수 있으며, 피항선의 동작만으로 충돌회피할 수 없을 때에는 최선의 협력동작을 취하도록 규정하고 있다.
상기를 종합하면 COLREGs에서 요구하는 총돌회피 요소는 조우형태에 따른 충분한 회피시기와 거리, 변침방향, 이격거리, 선수침로 변침각과 속력 감속량으로 분석할 수 있다.
3. 자율운항선박 평가방법
3.1 자율운항선박 평가절차
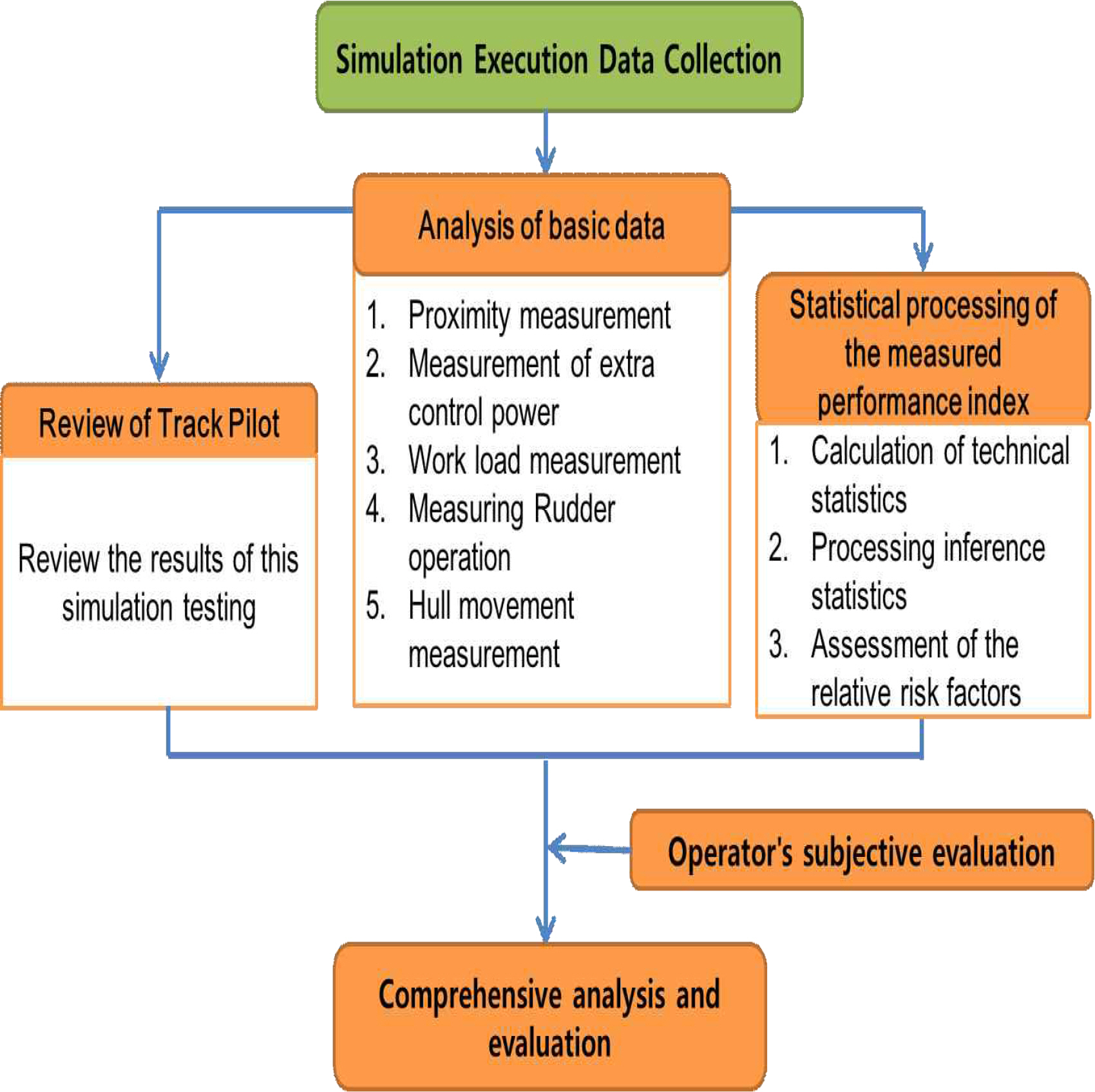
선박조종시뮬레이션을 이용한 자율운항선박 충돌회피능력의 평가 절차는 다음과 같으며 이를 도식화하면 Fig.2와 같다. 이때 사용되는 FMSS는 TRASNSAS사 NTPRO500모델이며, DNV-GL 인증을 받은 제품이다.
1) 선박조종전문가 6명이 전형적인 조우형태(추월, 마주침, 횡단 상태) 및 특수상황에 대한 선박조종시뮬레이션을 실시한다.
2) 선박조종전문가가 실시한 선박조종시뮬레이션에 대하여 선위, 선수침로, 선속, 타각사용량 등의 기초 데이터를 수립한다.
3) 수집된 기초데이터를 이용하여 평가요소에 대하여 기술적 통계량을 분석한다.
4) 선박조종전문가의 기술적 통계량 분석 자료를 토대로 조우형태별 평가요소에 대한 평가모델을 개발한다.
5) 자율운항선박에 대해 시뮬레이션을 실시하고 기초 데이터를 수집하여 기술통계량을 분석한다.
6) 자율운항선박의 기술통계량을 평가모델로 정량화 한다.
3.2 선박조종시뮬레이션 설계 및 실시
2.2.3 자율운항선박의 충돌회피 알고리즘
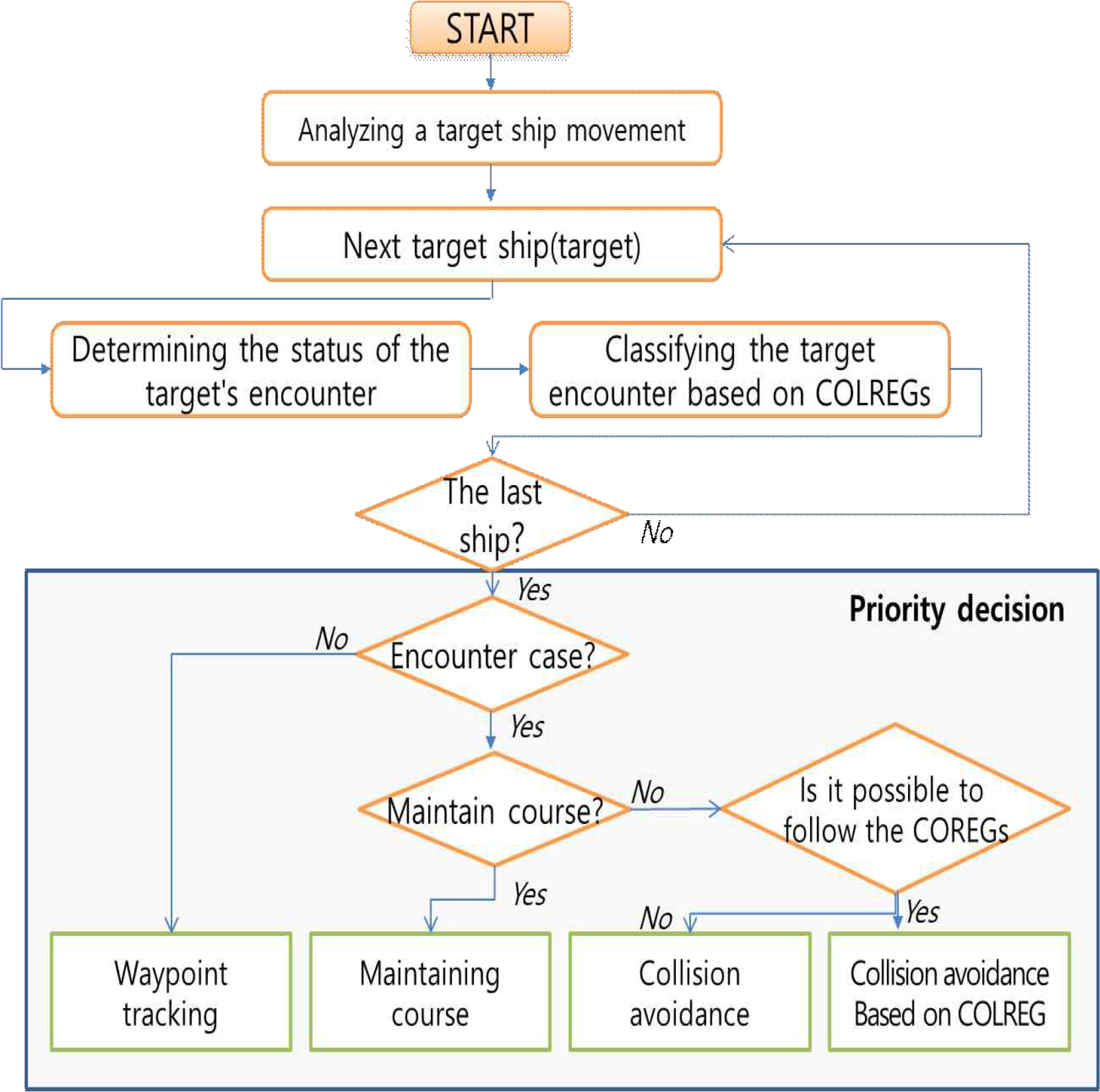
자율운항선박의 충돌회피능력 평가에 사용된 충돌회피알고리즘은 Cho et al.(2019) 기반으로 개발된 것으로 순서도는 Fig. 3과 같다.
자율운항선박의 충돌회피 알고리즘은 충돌확률, COLREGs 및 경로추종을 포함한 비용함수로 계산하며 그 식은 다음과 같다.
여기서 PVOo는 충돌확률, p는 COLREGs 미준수 불이익, α|vo-v℘|+β|ψo-ψ℘|는 경유점 추종을 위한 비용함수을 의미하며, α와 β는 가중치, v℘와 ψ℘는 목표 선속과 침로이며 비용함수의 최소값을 만족하는 vo 와 ψo는 계수에 따라 가중치가 다르게 반영되며, 이 가중치에 따라 충돌회피 및 COLREGs 경유점 추종의 가중치 설정이 가능하며, 해당 계수가 커짐에 따라 해당 항목의 가중치를 크게 반영하여 선수각 및 속도를 결정하여 충돌회피를 수행한다.
2.2.4 선박조종시뮬레이션 실시
선박조종시뮬레이션은 1급 항해사 면허를 소지하고 선장, 1항사 등 선박조종시뮬레이션을 수행한 오랜 경험이 있는 선박조종전문가 6명이 6개의 case에 대해 Pre-simulation을 실시한 후 시뮬레이션을 수행하였다. MASS의 경우 충돌알고리즘 개발자가 FMSS에 알고리즘을 설치한 후 연동 테스트를 거쳐 시뮬레이션을 실시하였다. 시뮬레이션 결과의 종합 항적도는 Fig.4와 같다. 각 그림에서 적색은 실험에 참여한 전문가들의 항적이며, 노란색은 자율운항선박의 항적이며 청색은 타선의 항적을 나타낸다.
① case 1: 추월 상태(본선이 추월선)
② case 2: 거의 마주치는 상태
③ case 3: 정횡 횡단상태(본선이 피항선)
④ case 4: 정횡 횡단상태로 본선이 유지선이나 피항선이 피항 회피동작을 취하지 않는 경우
⑤ case 5: 추월에 가까운 횡단상태(본선 피항선)
⑥ case 6: 선대 또는 그룹선박과 마주치는 경우
3.3 선박조종전문가의 시뮬레이션의 평가요소 계측 방법
3.3.1 평가요소
기초자료조사에서 자율운항선박의 충돌회피능력 평가를 위한 요소는 COLREGs의 충돌회피 동작과 해상교통안전진단의 평가요소를 고려하여 다음의 Table 3과 같이 설정하였다.
3.3.2 선박조종시뮬레이션 결과 데이터 계측
선박조종전문가와 자율운항선박이 실시한 선박조종시뮬레이션은 시뮬레이션 시작시점에서 종료시점까지 매 10초 간격으로 본선과 상대선의 위치, 선속 및 선수침로를 수집하여 평가요소들을 계측하였다.
3.3.3 충돌회피 시점 계측
COLREGs에서는 선박 조우 시 충분히 여유 있는 시간에 충돌회피동작을 취하도록 요구하고 있다. 이를 평가하기 위해 충돌회피 시작시점에서 두 선박간의 거리와 시간적 여유를 다음과 같이 계산하였다.
여기서, Ds와 Ts는 충돌회피 시작시의 두 선박간의 거리와 상대시간, Oxs, Oys와 Txs, Txs와은 충돌회피시작시의 본선과 상대선의 위치좌표, Do는 두 선박간 초인거리, t는 Do에서 Ds까지 소요시간이다.
3.3.4 충돌회피 동작 계측
COLREGs에서는 피항선은 상대선박의 진로를 방해하지 않도록 올바른 변침방향과 상대선박이 인지할 수 있는 명확한 변침량과 선속 변화량을 요구하고 있다. 따라서 이를 평가하기 위한 변침방향과 최대 변침량 및 선속 변화량은 다음과 같이 계산하였다.
여기서, MaxCOH는 최대 변침량, Ho와 Hc는 충돌회피 전과 완료 후 선수침로, MaxCOS는 최대 선속 변화량, Vo 와 Vc는 충돌회피 전과 완료 후 선속, MaxCOS가 +이면 우현변침, - 이면 좌현변침, MaxCOS가 +이면 증속량, - 이면 감속량을 보인다.
3.3.5 충돌위험성 계측
COLREGs에서 요구하는 충분한 이격거리를 확보하여 피항통항하도록 요구하고 있으며 이를 평가하기 위해 두 선박간 최소근접거리는 매 10초마다 본선과 상대선의 위치좌표를 이용하여 다음과 같이 계산하고 최소값을 최근접거리로 하였다.
여기서, CPA는 최근접거리, Oxn, Oyn은 매 10초 마다 본선의 위치좌표, Txn, Tyn은 매 10초 마다 상대선의 위치좌표이다.
상대선박과의 충돌확률 P는 다음 공식으로 구하며 해상교통안전진단에서 P가 10-4이하이면 충돌확률이 없는 것으로 간주한다.
여기서 ζ=μ/σ 이며, μ는 최근접거리 평균, σ는 최근접 거리의 표준편차이다.
3.4 선박조종전문가의 시뮬레이션 기술통계량
선박조종전문가 6명이 실시한 시뮬레이션을 결과에 대한 기초 데이터를 이용하여 평가요소를 각각 계측하였으며 각 평가요소에 대한 평균, 표준편차 및 충돌확률을 구하였다. 다음 Table 4는 case2에 대한 예시이다. 표에서 DOH는 선수방위 방향 (Direction of heading change)를 나타내며, COH는 선수 방위의 변화량(Change of Heading)을 의미한다.
4. 자율운항선박 평가
4.1 정량화 평가모델 작성
모집단 표본(선박조종전문가)이 실시한 각 case별 시뮬레이션 결과 계측값을 바탕으로 모집단(선장)의 분포를 추정하였으며 본 연구에서는 다음 공식을 활용하여 Fig. 10과 같이 모집단 신뢰구간을 95% 범위로 추정하여 시뮬레이션 평가점수표 구간이 이 범위 내에 위치하도록 하였다.
여기서 X ¯
이는 선박조종전문가의 충돌회피 동작이 실무 선장들의 충돌회피 동작의 95%로 유사함을 의미한다.
평가모델의 점수 기준은 σ/4을 10점 기준하여 10등급 분류하여 평가모델을 작성하였으며 Table 6은 case2에 대한 평가모델을 도출한 예시이다.
다만, 충돌회피방향 평가는 COLREGs에서 명확한 회피방향을 규정하지 않은 경우 선박조종전문가의 회피방향과 같은 경우 100점으로 다른 경우 50점으로 평가하였으며 다수의 선박과 조우하는 경우 모든 선박과의 평가요소를 적용하고 평가 점수가 최소인 점수로 평가하였다.
각 평가항목은 100점을 기준으로 평가하였으며 최종점수는 평가항목 점수를 모두 합한 후 7로 나누어 최종점수로 정량화하였다.
4.2 자율운항선박 정량적 평가 결과
자율운항선박의 시뮬레이션 계측값을 각 case별 평가모델에 적용하여 충돌회피능력을 평가한 결과는 Table 8와 같다.
자율운항선박의 충돌회피 능력을 평가한 결과 전형적인 선박의 조우형태인 추월, 마주침 및 피항선 횡단은 높은 평가를 받았지만 특수상황인 피항선의 미 피항시 충돌회피, 추월에 가깝게 횡단하는 유지선에 대한 충돌회피 및 선대 또는 그룹과의 마주침 상태에서 충돌회피 능력은 낮은 평가를 받았다. 이는 자율운항선박의 충돌회피능력이 두 선박 간 전형적인 조우 상태에 대해서는 COLREGs를 적용하는데 문제가 없으나 선원의 오랜 경험과 상무로 피항동작을 취하는 특수한 상황에 대한 충돌회피 알고리즘을 개선할 필요가 있는 것으로 평가되었다.
5. 결 론
본 연구는 선박조종시뮬레이션을 이용하여 자율운항선박이 대양에서 선박 조우시 충돌회피능력을 정량적으로 평가하기 위한 평가모듈 개발 일환으로 위해 수행하였다. 이를 위해 선박 조우형태가 다른 각 case에 대해 선박조종전문가들과 자율운항선박이 시뮬레이션을 실시하고 선박조종전문가들이 수행한 시뮬레이션 결과 데이터를 토대로 충돌회피 시작시 거리, 상대시간, 회피 방향, 선수침로 변침량, 선속 변속량, 최근접거리 및 충돌확률에 대한 기술 통계량을 분석하여 이들 평가요소에 대한 평가모델을 개발하였다. 자율운항선박이 실시한 시뮬레이션 결과 데이터를 이용하여 평가요소에 대한 기술 통계량을 작성하고 이를 평가모델에 의거하여 정량적 점수를 산출하고 선박조종전문가들이 산출된 점수를 검증하였는데 그 결과는 다음과 같다.
(1) 본 평가모델을 적용하면 사람중심으로 자율운항선박의 충돌회피 능력을 정량적으로 평가할 수 있었다.
(2) 자율운항선박의 COLREGs 항법 적용 여부를 평가할 수 있었다.
(3) 본 평가모델은 자율운항선박의 충돌회피 알고리즘에 대한 개선 점을 파악하고 기술개발 완성도를 높이는데 기여할 수 있다.
(4) 본 연구에 이용된 자율운항선박의 충돌회피 능력은 선원의 오랜 경험과 조종기술이 요구되는 case에 대한 점수가 낮아 이에 대한 보완이 필요하다.
향후 협수로, 통항분리대 및 항만 내에서 자율운항선박의 통항안전성을 평가할 수 있는 모델을 추가로 개발하여 적용한다면 자율운항선박의 기술개발에 많은 도움이 될 것으로 사료되며 항해사의 충돌회피능력의 배양에도 이용 가능할 것으로 판단된다.

 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






