내륙 differential ASF 측정을 통한 Loran-C 시각 정확도 향상
Improvement of Loran-C Timing Accuracy by Inland Differential ASF Measurements
Article information
Abstract
본 연구에서는 내륙에서 수신한 로란 9930M 포항 송신국의 로란신호를 이용하여 Loran differential ASF를 측정하였고, 이를 통해 로란 신호의 시각동기 정확도를 향상시켰다. Differential ASF는 한국표준과학연구원(KRISS)의 UTC(KRIS) 기준 TOA 데이터에서 충남대학 교와 국립해양측위정보원에 설치된 원자시계를 기준으로 동시에 측정된 TOA 데이터를 각각 차분함으로써 구하였다. 자기장 안테나를 이용한 충남대학교에서의 60분 평균 TOA 측정결과는 0.1 μs 이내의 변동성을 보였고 국립해양측위정보원에서의 TOA 측정결과는 0.05 μs 이내의 변 동성을 보였다. 또한 충남대학교와 국립해양측위정보원에서의 60분 평균 differential ASF 측정결과는 수신국의 주변 환경 영향에 의해 최대 0.1 μs 정도까지 시각 변동성을 나타냈다. 따라서 UTC(KRIS)를 기준으로 측정한 TOA 데이터로 충남대학교와 국립해양측위정보원 측정 데이 터를 각각 보상하면 differential ASF 변화가 상쇄되어 로란 신호를 이용한 시각동기 정확도를 10 ns 정도 이내로 향상시킬 수 있다. 그리고 세 슘원자시계를 기준으로 포항 송신국 로란 신호의 기준위상과 KRISS에서의 로란 수신기의 출력 기준위상을 측정하여 두 지점 사이의 ASF는 약 3.5 μs로 나타났다.
Trans Abstract
In this study we measured a differential ASF to improve the accuracy of time synchronization with the signal transmitted from Pohang 9930M Loran station. We obtained the differential ASF which is calculated from a difference of the TOA measurements between KRISS and Chungnam National University(CNU), and KRISS and National Maritime PNT Office respectively. The TOA measurement at KRISS was measured by UTC(KRIS) reference clock and other sites were measured by atomic clocks respectively. The time variations of differential ASF measurements at CNU and National Maritime PNT Office were within 0.1 μs and 0.05 μs respectively. And we found the time variations of 0.1 μs depending on the surrounding radio-wave environments from the differential ASF measurements of 60 minute moving averages. We can improve the accuracy of time synchronization of the local clock to within 10 ns by compensating the differential ASF through removing the common component of ASF. And we measured the absolute ASF between the Pohang transmit station and KRISS by the measurement technique of absolute time delay using a cesium atomic clock. The average ASF between two points is about 3.5 μs.
1. 서 론
로란 신호가 송신국으로부터 수신기에 전달될 때 시각 정 확도에 영향을 주는 가장 큰 요소는 경로지연 오차이다. 실제 환경에서는 송신기와 수신기사이의 지형 및 날씨 변화 등 여 러 요인에 의해서 신호의 전파지연이 달라진다(Samaddar, 1979; Doherty, 1979). ASF (Additionary Secondary Factor) 는 로란 신호가 내륙지역을 통해 전파될 때 부가적으로 생기 는 전파지연 요소로 시각동기 및 위치측정에 가장 큰 영향을 미치는 요소이다(Celano, 2005). 내륙에서의 ASF를 이론적 모 델링을 통하여 그 값을 예측할 수 있으나, 실제 사용 가능한 수준이 되려면 정확한 지표의 세분화된 전도율 데이터와 고도 정보가 필요하다. 그러나 국내 국토에 대한 정밀한 데이터베 이스를 확보할 수 없을 뿐만 아니라 일변화, 계절변화와 같이 시간적으로 달라지는 전도율을 정확히 모델에 반영할 수 없으 므로 실측 데이터를 적용하여 보정한 후에 사용할 수 있다 (Shin, 2010). 따라서 아래에 언급할 differential 기법을 포함 한 실측 기술은 ASF의 정확한 산출을 위해 반드시 필요하다.
지상파신호를 이용한 시각동기의 정밀도와 항법성능의 분 석을 위해서는 신호의 전파지연특성을 분석해야한다(Johler, 1956). 로란 신호는 육지 표면을 따라 전파될 때 전도율 및 지 형의 영향에 따라 전파지연이 추가로 발생되며 이는 TOA (Time of Arrival)를 통해 측정할 수 있다. 지상파를 이용한 TOA 측정 오차는 송신국 시계오차, 공간파에 의한 간섭, ASF, 수신기 지연 및 수신기 시계오차 등이 있다(Pelgrum, 2006). 기준국에서 원자시계를 기준으로 로란 기준신호의 위 상을 측정하면 ASF의 변동성을 측정할 수 있고 기준국에 인 접한 수신국들도 거의 유사한 변동성을 갖는다. 기준국의 TOA 데이터와 수신국 TOA 데이터의 차이값이 differential ASF이고 이를 보정하면 수신국시계와 기준국 시계와의 위상 차를 보상할 수 있다(Benjamin et al., 2004). 이 위상차가 보 상되도록 수신국 시계 위상을 제어하면 인접 수신국의 시각을 기준국 원자시계 기준으로 동기시킬 수 있다.
본 연구에서는 Loran differential ASF 측정을 통해 로란 9930M 포항 송신국의 신호를 이용한 로란 신호의 시각동기 정확도를 향상시켰다(Lombardi, 2006). Differential ASF는 한 국표준과학연구원(KRISS)에서의 원자시계 기준 TOA 데이터 에서 충남대학교와 국립해양측위정보원(구 위성항법중앙사무 소)에서의 원자시계 기준으로 각각 동시에 측정된 TOA 측정 데이터를 차분함으로써 획득하였다. 충남대학교에서의 differential ASF 측정은 자기장 안테나를 이용하였고 국립해 양측위정보원에서는 자기장, 전기장 안테나를 모두 이용하였 다. 또한 KRISS 기준국의 절대 ASF의 측정을 위해 포항 송 신국 로란신호의 기준위상과 KRISS 로란 수신기의 출력 기 준위상을 세슘원자시계를 기준으로 측정하였다.
2. Differential ASF 측정
2.1 충남대학교 지점 측정
로란신호의 위상변화를 측정하기 위하여 Fig. 1과 같이 KRISS로부터 근거리에 있는 기준국에 세슘원자시계를 기준 으로 하는 TOA 측정시스템을 구현하였다. 즉, 이동용 세슘원 자시계(Portable Cs Atomic Clock)의 안정된 주파수와 초펄스 신호를 분배증폭기를 이용하여 시간간격계수기(TIC)에 한 쪽 에 입력하고 H-field 및 E-field 로란 수신기에서 출력되는 초펄스 신호를 TIC의 다른 한쪽에 입력하여 두 수신기간의 시간차이를 PC에 기록한다. 또한 정확하고 안정된 세슘원자 시계라 할지라도 시간에 따라 오차가 발생하므로 이 값을 측 정하기 위해 시각비교용 GPS 수신기를 이용하고 그 값을 보 정함으로써 송신국, 수신국, KRISS의 클럭이 일치되도록 하 였다. 이 시스템을 이용하여 Fig. 2에서 보는 바와 같이 KRISS에서 직선거리 약 3.2 km에 위치한 충남대학교 공과대 건물 옥상에서 로란 신호의 TOA 측정을 하였다. KRISS와 충남대학교에서는 데이터의 보완 및 검증을 위해서 Fig. 3에 서 보는 바와 같이 좌측의 E-field 안테나와 우측의 H-field 안테나를 이용한 2 개의 TOA 측정시스템으로 약 2.5 일간 측 정하였다. Fig. 4(상)는 KRISS와 충남대학교에서 모두 H-field 안테나를 이용한 TOA 측정 결과이고, Fig. 4(하)는 E-field 안테나를 이용한 TOA 측정 결과이다. Fig. 4(상)에서 충남대학교의 TOA 데이터에 잡음 형태의 급격한 데이터 변 화가 관측되는데 이것은 수신에 사용된 H-field 안테나가 옥 상의 에어컨 압축기 등의 동작에 따른 주변의 자장변화에서 발생한 자기파에 의해 영향을 받아 생긴 현상으로 판단된다. 반면 자장변화와 관계가 없는 E-field 안테나를 이용한 경우 TOA 측정의 잡음이 발생하지 않았다.

TOA measurement system

Measurement points and the distances between the points and KRISS

Antennas on the roof of building at Chungnam national university: E-field antenna (left side) and H-field antenna (right side)
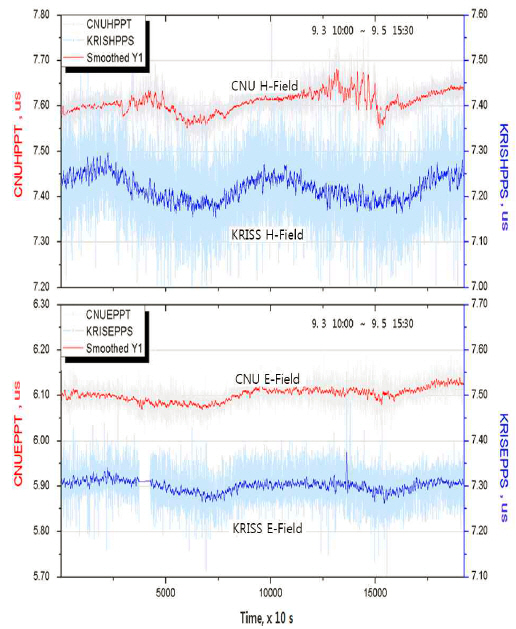
Measured TOA data at KRISS and Chungnam national university:
TOA data by H-field antenna(up),
TOA data by H-field antenna(up),
Fig. 5와 Fig. 6은 KRISS와 충남대학교에서 동시에 측정한 TOA 데이터를 차분한 differential ASF 데이터를 나타낸 것 이다. ASF 측정값은 순간적으로 변하는 양이 아니므로 differential ASF 측정결과를 30 분과 60 분 평균 처리하였다. 처리 결과에서 알 수 있듯이 60 분 평균값을 취하더라도 30 분 평균값에 나타난 변동이 그대로 반영되므로 ASF 결과로 활용이 가능하다. 측정 결과, 이틀의 측정기간 동안 0.1 μs 이 하의 변동폭이 측정되었다.
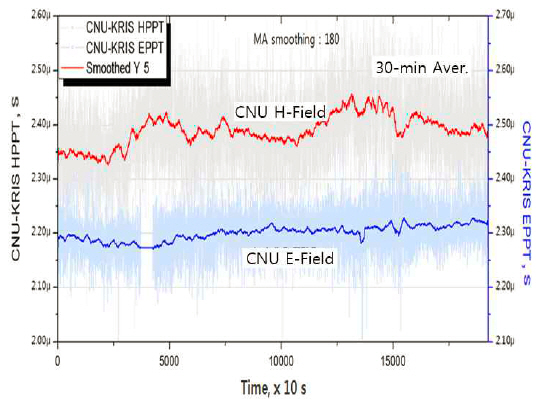
Differential ASF data at Chungnam national university (30-minute average)

Differential ASF data at Chungnam national university (60-minute average)
2.2 국립해양측위정보원 지점 측정
기준국과 수신국간의 거리에 따른 TOA 상관성 평가를 위 해 KRISS에서 약 7.7 km 떨어진 국립해양측위정보원에서 TOA 측정을 하였다. 측정 시스템은 Fig. 7에서 보는 것과 같 이 충남대학교에서 수행한 것과 동일한 시스템으로 약 2 일 동안 TOA를 측정하였으며, 측정 당시 KRISS에서는 H-field 안테나만 사용할 수 있어서 이것과 비교한 결과를 Fig. 8에 나타내었다. Fig. 8에서 측정된 KRISS의 H-field 안테나를 이 용한 TOA 측정과 위성항법 중앙사무소 TOA 측정결과는 충 남대학교에서의 측정결과보다 우수한 결과를 보였으며 이는 로란 신호의 수신위치에 따른 주변 환경의 영향으로 판단된 다. Fig. 9와 Fig. 10은 위성항법사무소에서의 TOA 측정데이 터를 충남대학교와 같은 방법으로 동일 시간의 KRISS 측정 값에서 각각 차분하여 30분과 60분 평균 differential ASF이 다.

Antennas on the roof of National Maritime PNT Office
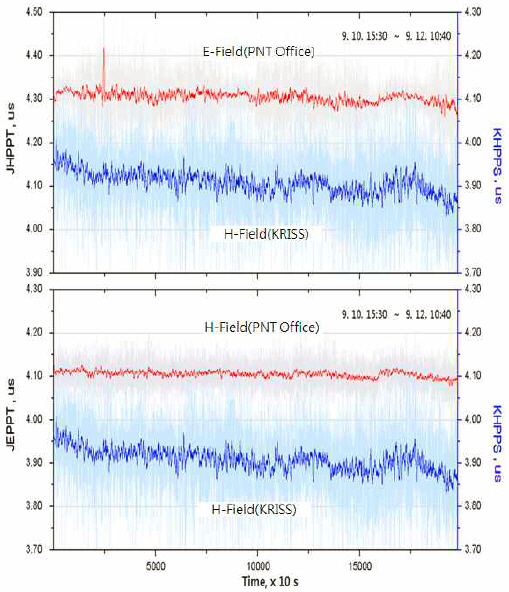
Measured TOA data at KRISS and National Maritime PNT Office

Differential ASF data at National Maritime PNT Office (60-minute average)
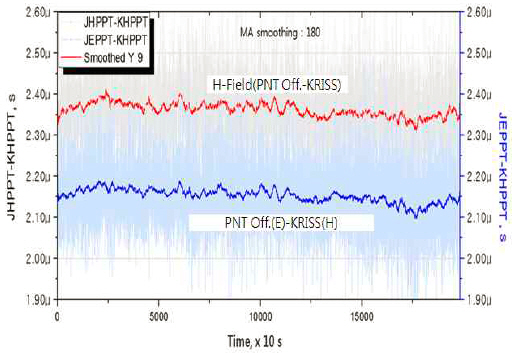
Differential ASF data at National Maritime PNT Office (30-minute average)
3. 절대 ASF 측정
Yang et al.(2010)에서 필드 측정을 위해 구현한 Fig. 11의 시스템을 활용하여 KRISS에서 포항 송신국까지의 절대 ASF 를 측정하였다. 본 시스템의 구성은 H-field 안테나와 loop 안 테나, 두 세트의 로란 수신기와 시간간격 측정기와 측정시점 의 위치좌표 측정용 DGPS 수신기, 데이터 수집용 PC, 오실로 스코프 그리고 기준시각원용 세슘원자시계, 무정전 확보를 위 한 UPS 등으로 구성되어 있다. 이를 이용하여 포항송신국과 KRISS 사이의 절대 ASF를 측정하였다. 이는 로란 신호를 이용한 시각 동기 활용을 위해 differential ASF와 더불어 반 드시 필요한 측정 기술이다.

ASF measurement system
Fig. 12는 포항송신국(A)과 대전(C), 서해안(D)까지의 전파 경로를 표시하였다. 송신국으로부터 대전을 지나 서해안까지 의 고도변화는 Fig. 13과 같다. 고도변화 데이터에서 볼 수 있 듯이 송신국에서의 로란신호는 대전까지 많은 고도변화를 거 치면서 전파됨을 알 수 있다. 원자시계 이용한 로란 기준신호 측정기법을 활용하면 서해안이나 남해안 지역 등 전국 어느 곳에서든지 절대 ASF를 측정할 수 있다. 현재 로란 시스템에 는 TOC (Time of Coincidence) 기능이 없기 때문에 위상변화 를 측정하기 위해서는 항상 포항 송신국에서 기준 위상을 설 정하고 원거리 수신점에서의 위상값 사이의 위상차를 측정하 면 절대 ASF를 측정할 수 있다(Yang, 2010). KRISS와 포항 송신국사이의 직선거리는 178 km이며 전파경로가 산간지방, 도시, 논 등의 다양한 지표면을 통과하고 있다. 절대 ASF는 측정 위치의 전파환경이 안정적인 경우 시간에 따른 지표면의 전도율에 따라 측정값이 변할 수 있다.

Pictures of measurement points (A: Pohang Loran station, C: KRISS, D: west coast)

Altitude of the path between the Pohang Loran station and west coast
KRISS에서의 절대 ASF 측정은 2010년 3월, 한 달간 7일 간격으로 4회에 걸쳐 측정하였다. Fig. 14와 같이 KRISS 표준 주파수(HLA) 방송국 안테나가 있는 곳에 원자시계 기준 이동 용 TOA 측정 시스템을 설치하여 표 1과 같이 매우 안정적인 절대 ASF 측정 결과를 얻었고 Fig. 15에 그 값을 도시하였다. 결과에서 보는 바와 같이 측정 때의 기후에 따른 경로의 전도 율 변화로 ASF의 값이 최대 0.1 μs 까지 변화됨을 확인할 수 있다. 특히, 3월 10일 측정의 경우는 다른 측정 결과에 비하여 ASF의 값이 작게 측정되었는데, 이것은 Fig. 14에서 보는 바 와 같이 측정 시점에 지면이 눈으로 덮여 지표면의 전도율이 변화하였기 때문이다.

Measurement at KRISS (2010.03.10)
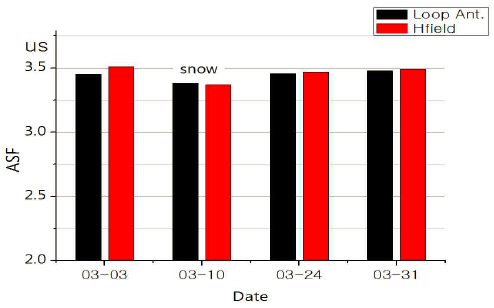
ASF measurement data at KRISS

ASF measurement data at KRISS
4. 결 론
본 연구에서는 포항 로란 송신국(9930M)의 신호를 이용하 여 Loran differential ASF 측정을 하였으며 이를 통해 로란신 호를 이용한 시각동기 정확도를 향상시켰다. 한국표준과학연 구원을 기준국으로 하고 충남대학교와 위성항법 중앙사무소 를 수신국으로 하여 각 수신국에 로란 수신기를 설치하고 세 슘원자시계에 기반한 TOA를 동시 측정하였다. KRISS TOA 측정 데이터를 기준으로 하는 충남대학교에서의 differential ASF 측정결과는 자기장 안테나에 의한 측정값이 전기장 안 테나를 이용한 측정값의 3 배 이상 큰 0.1 μs로 측정되었고 국 립해양측위정보원에서의 differential ASF 측정결과는 자기장 안테나, 전기장 안테나 측정 모두 0.05 μs 이내로 측정되었다. 또한 KRISS를 기준으로 한 differential ASF 측정에서는 충 남대학교에서의 측정결과가 수신기 주변 구조물의 영향으로 수신데이터가 불안정하였으며 안테나의 온도에 따른 일일 변 동성도 관측되었다. 반면 위성항법사무소에서의 측정결과는 비교적 안정적인 측정결과를 보여 측정 결과가 수신국의 주변 환경영향에 따라 최대 0.1 μs 정도 까지 변동성이 발생함을 확인하였다. 즉, 수신 환경적으로 악조건이 아니면 기준국에서 의 differential ASF 데이터를 이용하여 수신국들의 위상을 보 정하면 송신국으로부터 180여 km 떨어진 지점에서도 공통적 으로 변화하는 ASF가 상쇄되므로 시험국의 시각을 0.05 μs 이내의 정확도로 동기시킬 수 있음을 확인하였다.
포항 송신국 로란신호의 기준 위상과 로란 수신기의 출력 기준 위상을 세슘원자시계를 이용하는 측정 장치를 이용하여 KRISS에서의 송신국으로부터 절대 ASF를 측정하였다. 이는 로란의 정밀 시각 정보 활용을 위해 ASF 보상이 필요한 곳에 활용할 수 있으며 differential ASF 정확도 향상에 기여할 수 있다.