
1. м„ң лЎ
мөңк·ј мһҗмңЁмҡҙн•ӯм„ л°•(Maritime Autonomous Surface Ship, MASS)м—җ лҢҖн•ң м—°кө¬к°ңл°ңмқҙ көӯлӮҙмҷём—җм„ң 진н–үлҗҳкі мһҲлӢӨ(IMO, 2019; Lee, Choi and Yoo, 2021; Yim, 2021).
м•„мҡёлҹ¬, мқём •кё°кҙҖ(Recognized Organization, RO)мқ„ нҶөн•ҙм„ң мһҗмңЁмҡҙн•ӯм„ л°• лҳҗлҠ” мһҗмңЁмҡҙн•ӯм—җ н•„мҡ”н•ң мӢңмҠӨн…ң л°Ҹ кё°лҠҘм—җ лҢҖн•ң м•Ҳм „м„ұкіј мӢ лў°м„ұмқҙ кІҖмҰқлҗ кІғмқҙ мҡ”кө¬лҗҳкі мһҲлӢӨ(Korean Register, 2023b; IMO, 2013). к·ёлҰ¬кі м„ мӣҗмқҙ мҠ№м„ н•ҳм§Җ м•Ҡкұ°лӮҳ, лҳҗлҠ” мөңмҶҢмқёмӣҗл§Ң мҠ№м„ н•ҳлҠ” мһҗмңЁмҡҙн•ӯм„ л°•мқҳ нҠ№м„ұмңјлЎң мқён•ҳм—¬ кё°мЎҙмқҳ кІҖмӮ¬мӣҗм—җ мқҳн•ң м„ л°•кІҖмӮ¬ л°©лІ• мқҙмҷём—җ мғҲлЎңмҡҙ кІҖмӮ¬л°©лІ•мқҳ к°ңл°ңмқҙ н•„мҡ”н•ң мӢӨм •мқҙлӢӨ(Song, Lee, Han and Jang, 2022).
н•ңнҺё, IACS(International Association of Classification Societies)лҠ” кІҖмӮ¬мӣҗм—җ мқҳн•ң кІҖмӮ¬лҘј мЎ°кұҙмңјлЎң мӣҗкІ©кІҖмӮ¬кё°мҲ мқҳ мӮ¬мҡ©м—җ лҢҖн•ң к¶Ңкі лҘј м ңм•Ҳн•ң л°” мһҲмңјлӮҳ(IACS, 2016), м•„м§Ғ кҙҖл Ё көӯм ңнҳ‘м•Ҫм—җ л°ҳмҳҒлҗҳм§Җ м•ҠмқҖ мӢӨм •мқҙлӢӨ. к·ёлҹјм—җлҸ„ л¶Ҳкө¬н•ҳкі IACSлҠ” мҪ”лЎңлӮҳ-19(COVID-19)м—җ мқҳн•ҙм„ң кІҖмӮ¬мӣҗм—җ мқҳн•ң кІҖмӮ¬к°Җ л¶Ҳк°ҖлҠҘн•ң мғҒнҷ©мқҙ л°ңмғқн•ҳл©ҙм„ң кІҖмӮ¬мқҳ м—°кё°лҘј нҢҗлӢЁн•ҳлҠ”лҚ° нҷңмҡ©н• мҲҳ мһҲлҠ” мӣҗкІ©кІҖмӮ¬м—җ кҙҖн•ң м§Җм№Ёмқ„ IMO(International Maritime Organization)м—җ м ңкіөн•ң л°” мһҲлӢӨ(MSC, 2020). к·ё нӣ„ лҸҷ м§Җм№Ём—җ л”°лқј мӣҗкІ©кІҖмӮ¬к°Җ лӢӨм–‘н•ҳкІҢ нҷңмҡ©лҗҳл©ҙм„ң мӣҗкІ©кІҖмӮ¬мқҳ к°ҖлҠҘм„ұм—җ лҢҖн•ң мӮ°м—…кі„мқҳ кҙҖмӢ¬мқҙ мЈјлӘ©лҗҳкі мһҲлӢӨ. м•„мҡёлҹ¬, мӣҗкІ©кІҖмӮ¬лҠ” л¬ҙмқёнҷ”лҘј 추кө¬н•ҳлҠ” мһҗмңЁмҡҙн•ӯм„ л°• мӢңлҢҖмқҳ мғҲлЎңмҡҙ кІҖмӮ¬ л°©лІ•мңјлЎң нҷңмҡ©лҗ мҲҳ мһҲмқ„ кІғмңјлЎң мҳҲмғҒн•ҳкі мһҲлӢӨ.
мһҗмңЁмҡҙн•ӯм„ л°•мқҖ 4лӢЁкі„ мҲҳмӨҖмңјлЎң кө¬л¶„н• мҲҳ мһҲлҠ”лҚ°, мҲҳмӨҖ1мқҖ мһҗлҸҷнҷ”лҗң нҳ„мЎҙ м„ л°•мқҳ мһҗмңЁмҡҙн•ӯмқ„ м§Җмӣҗн•ҳлҠ” мҲҳмӨҖмқҙкі , мҲҳмӨҖ2лҠ” м„ мӣҗмқҙ мҠ№м„ н•ҳм§Җл§Ң мқјл¶Җ мӣҗкІ©м ңм–ҙк°Җ к°ҖлҠҘн•ң мҲҳмӨҖмқҙл©°, мҲҳмӨҖ3мқҖ м„ мӣҗмқҙ мҠ№м„ н•ҳм§Җ м•Ҡкі мӣҗкІ©м ңм–ҙк°Җ к°ҖлҠҘн•ң мҲҳмӨҖмқҙкі , мҲҳмӨҖ4лҠ” мҷ„м „мһҗмңЁмҡҙн•ӯмқҙ к°ҖлҠҘн•ң мҲҳмӨҖмқҙлӢӨ. нҳ„мһ¬ көӯлӮҙмҷём Ғмқё к°ңл°ңлӘ©н‘ңлҠ” мҲҳмӨҖ2мҷҖ мҲҳмӨҖ3 мӮ¬мқҙм—җ мһҲлӢӨ(Yim, 2021).
мҲҳмӨҖ2мҷҖ мҲҳмӨҖ3 мӮ¬мқҙмқҳ м„ л°•кІҖмӮ¬л°©лІ•мқҖ кІҖмӮ¬мӣҗм—җ мқҳн•ң кІҖмӮ¬ лҳҗлҠ” мӣҗкІ©кІҖмӮ¬ лҳҗлҠ” м–‘мһҗмқҳ нҳјн•© л“ұмқҳ нҳ•нғңлЎң м „к°ңлҗ кІғмңјлЎң мҳҲмғҒлҗҳкі , мң„м—җм„ң кё°мҲ н•ң л°”мҷҖ к°ҷмқҙ COVID-19лҘј нҶөн•ҙм„ң мӣҗкІ©кІҖмӮ¬ м—ӯмӢң кІҖмӮ¬мӣҗмқ„ лҢҖмӢ н• мҲҳ мһҲлҠ” мң мҡ©н•ң кІҖмӮ¬л°©лІ• мӨ‘ н•ҳлӮҳк°Җ лҗ кІғмңјлЎң мҳҲмғҒн•ҳкі мһҲлӢӨ.
мқҙлҹ¬н•ң мӣҗкІ©кІҖмӮ¬лҘј мң„н•ң л°©лІ•мқҖ лӢӨмқҢмқҳ 3к°Җм§ҖлҘј кі л Өн• мҲҳ мһҲлҠ”лҚ°, 1)л§Өк°ңліҖмҲҳлҘј мҲҳ집н•ҳкі ліём„ мһҘ비мқҳ мһ‘лҸҷмғҒнғңлҘј нҸүк°Җн•ҳкё° мң„н•ҳм—¬ мӮ¬л¬ј мқён„°л„·(IoT) лҳҗлҠ” м»ҙн“Ён„° л№„м „ л“ұмқ„ нҷңмҡ©н•ҳлҠ” л°©лІ•, 2)кІ°н•Ёмқ„ мқёмӢқн•ҳкі л¶„лҘҳн•ҳлҠ” мқёкіөм§ҖлҠҘкё°л°ҳ кё°мҲ , 3)мҲҳ집лҗң лҚ°мқҙн„°лҘј кё°л°ҳмңјлЎң кІҖмҰқн•ҳкі м ң3мһҗлҘј нҶөн•ҙм„ң мқёмҰқн•ҳлҠ” л°©лІ• л“ұмқҙлӢӨ(Korean Register, 2023a; Korean Register, 2023b).
мң„мқҳ 3к°Җм§Җ л°©лІ•мқҙ кө¬нҳ„лҗҳкё° мң„н•ҙм„ңлҠ” лӢӨм–‘н•ң н•ҷл¬ё 분야м—җм„ңмқҳ м—°кө¬к°Җ н•„мҡ”н•ңлҚ°, мҡ°м„ н•ҳм—¬ нҳ„мЎҙ м„ л°•м—җ м„Өм№ҳлҗң мһҘ비 лҳҗлҠ” м„Өм№ҳ мҳҲм •мқё мһҘ비лҘј м–ҙл– н•ң ліҖкІҪмқҙлӮҳ ліҖнҳ• м—Ҷмқҙ кІҖмӮ¬м—җ н•„мҡ”н•ң мғҒнғңлҘј мқём§Җн•ҳкұ°лӮҳ, лҳҗлҠ” кІҖмӮ¬м—җ н•„мҡ”н•ң мҲҳм№ҳлҘј нҢҗлҸ…н• мҲҳ мһҲлҠ” л№„м ‘мҙүмӢқ кІҖмӮ¬л°©лІ•мқҳ к°ңл°ңмқҙ н•„мҡ”н•ҳлӢӨ. нҳ„мһ¬ мҶҢнҳ• м№ҙл©”лқјлҘј мқҙмҡ©н•ң л№„м ‘мҙүмӢқ л°©лІ•мқҙ м„ л°•кІҖмӮ¬м—җ мқјл¶Җ м Ғмҡ©лҗҳкі мһҲлӢӨ(MSC, 2021).
м„ л°•кІҖмӮ¬м—җ н•„мҡ”н•ң мҳҒмғҒмІҳлҰ¬кё°мҲ мқҖ мӮ¬к°Ғнҳ• л°•мҠӨм—җ кі м •лҗң мҲ«мһҗмҷҖ л¬ёмһҗлҘј нҢҗлҸ…н•ҳлҠ” мһҗлҸҷм°Ё лІҲнҳёнҢҗ мқёмӢқкё°мҲ кіјлҠ” нҒ° м°Ёмқҙк°Җ мһҲлӢӨ. м„ л°•мқҳ к°Ғмў… мһҘ비лҠ” лҢҖмІҙлЎң л°ҖнҸҗлҗң кіөк°„ лҳҗлҠ” м—ҙм•…н•ң нҷҳкІҪм—җ м„Өм№ҳлҗҳкё° л•Ңл¬ём—җ мҳҒмғҒм—җ мһЎмқҢмқҙ нҸ¬н•Ёлҗҳкі мҠөлҸ„мҷҖ мҳЁлҸ„м—җ л”°лҘё мҳҒмғҒмқҳ лІҲм§җкіј нҮҙмғү л“ұмқҙ л°ңмғқн•ңлӢӨ.
ліё м—°кө¬мқҳ мөңмў…лӘ©н‘ңлҠ” м№ҙл©”лқјлҘј м„ л°• мһҘ비м—җ м„Өм№ҳлҗң м•„лӮ лЎңк·ё кІҢмқҙм§Җ(analog gauge) л¶Җк·јм—җ кі м • м„Өм№ҳн•ң нӣ„ мҳҒмғҒмІҳлҰ¬лҘј нҶөн•ҙм„ң мһҘ비мқҳ мғҒнғңлҘј кІҖмӮ¬н•ҳкё° мң„н•ң кІғмқҙлӢӨ. мқҙлҘј мң„н•ҙм„ңлҠ” лӢӨмқҢмқҳ м Ҳм°Ёк°Җ н•„мҡ”н•ңлҚ°, 1) м•„лӮ лЎңк·ё кІҢмқҙм§Җ м „мІҙмқҳ мңӨкіҪмқ„ кІҖм¶ңн•ң нӣ„, 2) мҲҳмӢңлЎң ліҖлҸҷн•ҳлҠ” м•„лӮ лЎңк·ё кІҢмқҙм§Җмқҳ м§ҖмӢңл°”лҠҳм—җ кҙҖн•ң к°қмІҙлҘј мӢқлі„н•ҳкі , 3) м§ҖмӢңл°”лҠҳ к°қмІҙмқҳ мң„м№ҳлҘј нҢҗлі„н•ң нӣ„, 4) мөңмў…м ҒмңјлЎң м§ҖмӢңл°”лҠҳ мң„м№ҳм—җ н‘ңмӢңлҗң лҲҲкёҲкіј мҲ«мһҗ лҳҗлҠ” л¬ёмһҗлҘј нҢҗлҸ…н•ңлӢӨ.
ліё м—°кө¬мқҳ лӘ©м ҒмқҖ мң„мқҳ 4к°Җм§Җ м Ҳм°Ё мӨ‘м—җм„ң м•„лӮ лЎңк·ё кІҢмқҙм§Җ мҳҒмғҒмІҳлҰ¬м—җ мҡ°м„ н•„мҡ”н•ң 1)кіј 2)м—җ кҙҖн•ң кө¬нҳ„л°©лІ•мқ„ к°ңл°ңн•ҳкё° мң„н•ң кІғмңјлЎң, 1) мңӨкіҪмқ„ кІҖм¶ңн•ң нӣ„, 2) м§ҖмӢңл°”лҠҳм—җ кҙҖн•ң к°қмІҙлҘј мӢқлі„н•ҳкё° мң„н•ң кІғмқҙлӢӨ. мңӨкіҪ 추м¶ңмқҖ к°Җмҡ°мӢңм•Ҳ н•„н„°(Gaussian Filter), мһ„кі„мІҳлҰ¬(Thresholding), лӘЁнҸҙлЎңм§Җ м—°мӮ°(Morphological Operation) л“ұмқҳ кё°лІ•мқ„ мқҙмҡ©н•ҳм—¬ мҲҳн–үн•ҳкі , н—Ҳн”„ ліҖнҷҳ(Hough Transform)мқ„ нҶөн•ҙм„ң м§ҖмӢңл°”лҠҳмқҳ к°қмІҙлҘј мӢқлі„н•ҳмҳҖлӢӨ.
ліё м—°кө¬м—җм„ң м ңм•Ҳн•ң л°©лІ•мқҖ мһҗмңЁмҡҙн•ӯм„ л°•мқҳ мһҗлҸҷмӣҗкІ©кІҖмӮ¬лҘј мң„н•ң н•ҳлӮҳмқҳ кё°л°ҳкё°мҲ лЎң м Ғмҡ©лҗ мҲҳ мһҲмқ„ кІғмңјлЎң кё°лҢҖлҗңлӢӨ.
2. мқҙлЎ м Ғ л°°кІҪ
2.1 к°Җмҡ°мӢңм•Ҳ н•„н„°
м•„лӮ лЎңк·ё кІҢмқҙм§Җмқҳ мҳҒмғҒмІҳлҰ¬м—җм„ң мҡ°м„ н•„мҡ”н•ң кІғмқҖ мһЎмқҢ м ңкұ°мқҙлӢӨ. мһЎмқҢмқҙ нҸ¬н•Ёлҗң мҳҒмғҒмқҖ лӘ©н‘ң нҳ•мғҒмқҳ 추м¶ң мҳӨлҘҳ, л¬ёмһҗмҷҖ мҲ«мһҗмқҳ нҢҗлҸ… мҳӨлҘҳлҘј мҙҲлһҳн• мҲҳ мһҲлӢӨ.
мҳҒмғҒмІҳлҰ¬м—җм„ң мһЎмқҢм ңкұ°лҠ” мқјл°ҳм ҒмңјлЎң к°Җмҡ°мӢңм•Ҳ н•„н„°(Gaussian Filter, GF)лҘј мқҙмҡ©н•ңлӢӨ(Yim, 2019a; Yim, 2019b). GFлҠ” нҸүк· ОјмҷҖ н‘ңмӨҖнҺём°Ё Пғмқҳ мЎ°н•©мңјлЎң м •мқҳлҗң к°Җмҡ°мӢңм•Ҳ 분нҸ¬ N(Ој, Пғ2) мқ„ мқҙмҡ©н•ҳм—¬ мһЎмқҢмқ„ м ңкұ°н•ҳкё° мң„н•ң кІғмңјлЎң, кҙҖмӢ¬мқ„ л‘” мҳҒмғҒмқҳ лӘЁм„ңлҰ¬ мӨ‘мӢ¬м—җ мһҲлҠ” н”Ҫм…Җ(pixel)м—җ лҶ’мқҖ к°ҖмӨ‘м№ҳлҘј л¶Җм—¬н•ҳм—¬ мһЎмқҢмқ„ м ңкұ°н•Ёкіј лҸҷмӢңм—җ лӘЁм„ңлҰ¬лҘј мғҒлҢҖм ҒмңјлЎң ліҙмЎҙн•ҳкё° мң„н•ң кІғмқҙлӢӨ(Zivkovic, 2004; Song et al., 2020).
к°Җмҡ°мӢңм•Ҳ 분нҸ¬ N(Ој, Пғ2) мқҳ нҷ•лҘ л°ҖлҸ„н•ЁмҲҳ f(x)лҠ” лӢӨмқҢ мӢқ(1)мңјлЎң лӮҳнғҖлӮј мҲҳ мһҲлӢӨ.
м—¬кё°м„ң, ПғлҠ” н‘ңмӨҖнҺём°Ё, ОјлҠ” нҸүк· , eлҠ” м§ҖмҲҳн•ЁмҲҳ л“ұмқ„ лӮҳнғҖлӮёлӢӨ.
Fig. 1мқҖ 3к°Җм§Җ мў…лҘҳмқҳ 1м°Ёмӣҗ к°Җмҡ°мӢңм•Ҳ 분нҸ¬лҘј лӮҳнғҖлӮё кІғмңјлЎң, нҸүк· к°’ Ој = 0м—җ лҢҖн•ҙм„ң н‘ңмӨҖнҺём°Ёк°Җ к°Ғк°Ғ Пғ = 1.0, Пғ = 1.5, Пғ = 2.0 мқё кІҪмҡ°мқҳ 분нҸ¬лҘј лӮҳнғҖлӮёлӢӨ. GFлҠ” лӘЁм„ңлҰ¬ н”Ҫм…Җм—җ ліҖмҲҳ x = 0 м—җ н•ҙлӢ№н•ҳлҠ” нҷ•лҘ л°ҖлҸ„ к°’мқ„ к°ҖмӨ‘м№ҳлЎң м Ғмҡ©н•ҳкі , лӘЁм„ңлҰ¬ н”Ҫм…Җ мЈјліҖмқҳ н”Ҫм…ҖмқҖ ліҖмҲҳ x = 0 мқҳ нҷ•лҘ л°ҖлҸ„ к°’ліҙлӢӨ мһ‘мқҖ м •(+)мқҳ + x лҳҗлҠ” л¶Җ(-)мқҳ - x м—җ н•ҙлӢ№н•ҳлҠ” нҷ•лҘ л°ҖлҸ„ к°’мқ„ к°ҖмӨ‘м№ҳлЎң м Ғмҡ©н•ңлӢӨ. мқҙлҘј нҶөн•ҙ лӘЁм„ңлҰ¬ н”Ҫм…Җмқҳ мҳҒмғҒмқҖ лҚ”мҡұ м„ лӘ…н•ҙ진лӢӨ.
2.2 мһ„кі„мІҳлҰ¬
м•„лӮ лЎңк·ё кІҢмқҙм§Җмқҳ мҳҒмғҒмІҳлҰ¬м—җм„ң л‘җ лІҲм§ё мһ‘м—…мқҖ мһ„кі„мІҳлҰ¬(Thresholding)мқҙлӢӨ. мһ„кі„мІҳлҰ¬лҠ” н”Ҫм…Җмқҳ к°’мқҙ мЈјм–ҙ진 мһ„кі„к°’мқ„ л„ҳмңјл©ҙ к·ё н”Ҫм…Җмқ„ мҲ«мһҗ 1лЎң м§Җм •н•ҳкі мһ„кі„к°’мқ„ л„ҳм§Җ лӘ»н•ҳл©ҙ мҲ«мһҗ 0мңјлЎң м§Җм •н•ҳкё° мң„н•ң кІғмқҙлӢӨ. мқҙмҷҖ к°ҷмқҙ мһ„кі„мІҳлҰ¬лҠ” мҳҒмғҒмқ„ л‘җ к°ң мқҙмғҒмқҳ к·ёлЈ№мңјлЎң кө¬л¶„н•ҳлҠ” мһ‘м—…мқҙлӢӨ.
мһ„кі„мІҳлҰ¬лҠ” мқҙ진мІҳлҰ¬, мӮјм§„мІҳлҰ¬, лӢӨмӨ‘мІҳлҰ¬ л“ұ лӢӨм–‘н•ң нҳ•нғңк°Җ мһҲлҠ”лҚ°, ліё м—°кө¬м—җм„ңлҠ” к°қмІҙмӢқлі„мқ„ к°„лӢЁн•ҳкІҢ мІҳлҰ¬н•ҳкё° мң„н•ҳм—¬ мқҙ진мІҳлҰ¬(Binarization)лҘј м Ғмҡ©н•ҳмҳҖлӢӨ. мқҙ진мІҳлҰ¬лҠ” мҳҒмғҒмқ„ 2к°Җм§Җ мҲҳмӨҖ(кІҖмқҖмғүкіј нқ°мғү)мңјлЎң кө¬л¶„н•ҳлҠ” кІғмңјлЎң, мЈјлЎң л¬ём„ң мҠӨмә”, н…ҚмҠӨнҠё мқёмӢқ, мңӨкіҪм„ кІҖм¶ң л“ұм—җ мӮ¬мҡ©н•ңлӢӨ.
мқҙ진мІҳлҰ¬лҠ” лӢӨмқҢ мӢқ (2)кіј к°ҷмқҙ 0кіј 1мқҳ мқҙ진논лҰ¬ мЎ°н•© [0, 1]мқ„ мқҙмҡ©н•ҳм—¬ лӮҳнғҖлӮј мҲҳ мһҲлӢӨ(Szeliski, 2021).
м—¬кё°м„ң, B(x,y)лҠ” мқҙ진мІҳлҰ¬к°Җ лҗң мҳҒмғҒмқҳ 2м°Ёмӣҗ мўҢн‘ңмң„м№ҳ (x, y)м—җ лҢҖн•ң н”Ҫм…Җ к°’, f(x,y)лҠ” мһ…л ҘмҳҒмғҒмқҳ 2м°Ёмӣҗ мўҢн‘ңмң„м№ҳ (x, y)м—җ лҢҖн•ң н”Ҫм…Җ к°’, TлҠ” мһ„кі„к°’ л“ұмқ„ лӮҳнғҖлӮёлӢӨ.
мқҙлҹ¬н•ң мқҙ진мІҳлҰ¬м—җ мқҳн•ҙм„ң мһ„кі„мІҳлҰ¬к°Җ лҗң мҳҒмғҒмқҖ кІҖмқҖмғүкіј нқ°мғүмңјлЎң лҡңл ·н•ҳкІҢ кө¬л¶„лҗҳкё° л•Ңл¬ём—җ мҳҒмғҒм—җ нҸ¬н•Ёлҗң л¬јмІҙмӢқлі„мқҙ мҡ©мқҙн•ҙм§ҖлҠ” мһҘм җмқҙ мһҲлӢӨ. мқҙм—җ л°ҳн•ҳм—¬, мқҙ진мІҳлҰ¬ мһ‘м—…м—җ мҳӨлҘҳк°Җ л°ңмғқн•ҳкұ°лӮҳ кІҪкі„к°Җ л¶Ҳнҷ•мӢӨн•ң мҳҒмғҒмқҳ кІҪмҡ°м—җлҠ” мҳҒмғҒ мҶҗмӢӨ лҳҗлҠ” мӣҗн•ҳм§Җ м•ҠлҠ” мһЎмқҢмқҙ 추к°ҖлЎң л°ңмғқн• мҲҳ мһҲлҠ” лӢЁм җмқҙ мһҲлӢӨ.
2.3 лӘЁнҸҙлЎңм§Җ м—°мӮ°
м•„лӮ лЎңк·ё кІҢмқҙм§Җмқҳ мҳҒмғҒмІҳлҰ¬м—җм„ң м„ё лІҲм§ё мһ‘м—…мқҖ лӘЁнҸҙлЎңм§Җ м—°мӮ°(Morphological operation)мқҙлӢӨ. лӘЁнҸҙлЎңм§Җ м—°мӮ°мқҖ к°қмІҙмқҳ нҳ•нғңлҘј 분м„қн•ҳкі мІҳлҰ¬н•ҳкё° мң„н•ң кІғмңјлЎң, к°қмІҙмқҳ кІҪкі„лҘј н‘ңнҳ„н•ҳлҠ”лҚ° н•„мҡ”н•ң м •ліҙлҘј 추м¶ңн•ҳкұ°лӮҳ, мқҙ진мІҳлҰ¬м—җм„ң л°ңмғқн•ҳлҠ” мһЎмқҢмқ„ м ңкұ°н•ҳкё° мң„н•ң кІғмқҙлӢӨ. м•„мҡёлҹ¬, к°қмІҙ к°„мқҳ кІ№м№Ё 분лҰ¬, к°қмІҙ лӘЁм–‘мқҳ лӢЁмҲңнҷ” л“ұмқҳ лӘ©м ҒмңјлЎңлҸ„ нҷңмҡ©лҗңлӢӨ(Gonzalez and Woods, 2009).
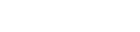
лӘЁнҸҙлЎңм§Җ м—°мӮ°мқҖ лӢӨмқҢмқҳ 4к°Җм§Җ мў…лҘҳк°Җ мһҲлҠ”лҚ°, 1)м№ЁмӢқ(Erosion), 2)нҢҪм°Ҫ(Dilation), 3)м—ҙлҰј(Opening), 4)лӢ«нһҳ(Closing) л“ұмқҙлӢӨ. мқҙлҹ¬н•ң 4к°Җм§Җ м—°мӮ°л°©лІ•мқҖ AND лҳҗлҠ” ORмҷҖ к°ҷмқҖ л…јлҰ¬м—°мӮ°кіј мң мӮ¬н•ң л°©лІ•мңјлЎң мІҳлҰ¬н•ңлӢӨ.
Fig. 2мқҳ (a)л¶Җн„° (d)к№Ңм§Җмқҳ 4к°ң к·ёлҰјмқҖ 4к°Җм§Җ лӘЁнҸҙлЎңм§Җ м—°мӮ°мқҳ мҳҲлҘј лӮҳнғҖлӮёлӢӨ. 4к°ң к·ёлҰјмқҖ кіөнҶөм ҒмңјлЎң м„ё л¶Җ분мңјлЎң кө¬м„ұлҗҳм–ҙ мһҲлҠ”лҚ°, мўҢмёЎ к·ёлҰјл“ӨмқҖ nO Г— mO м°Ёмӣҗмқҳ н”Ҫм…ҖлЎң кө¬м„ұлҗң мқҙ진мІҳлҰ¬ лҗң мһ…л Ҙ мҳҒмғҒ(O)мқ„ лӮҳнғҖлӮҙкі , мӨ‘к°„ к·ёлҰјл“ӨмқҖ nF Г— mF м°Ёмӣҗмқҳ н•„н„°(F)лҘј лӮҳнғҖлӮҙкі , мҡ°мёЎ к·ёлҰјл“ӨмқҖ лӘЁнҸҙлЎңм§Җ м—°мӮ°мқҙ м Ғмҡ©лҗң nOвҖІ Г— mOвҖІ м°Ёмӣҗмқҳ м¶ңл Ҙ мҳҒмғҒ(OвҖІ)мқ„ лӮҳнғҖлӮёлӢӨ.
4к°Җм§Җ лӘЁнҸҙлЎңм§Җ м—°мӮ°мқҳ мҳҲлҘј к°Ғк°Ғ м„ӨлӘ…н•ҳл©ҙ лӢӨмқҢкіј к°ҷлӢӨ.
1) м№ЁмӢқ м—°мӮ°(Erosion operation)
м№ЁмӢқ м—°мӮ°мқҖ лӢӨмқҢ мӢқ(3a)мңјлЎң лӮҳнғҖлӮј мҲҳ мһҲмңјл©°, м№ЁмӢқ м—°мӮ°мқҳ кІ°кіј(OвҖІe)лҠ” Fxмқҳ лӘЁл“ мўҢн‘ңк°Җ Oм—җ нҸ¬н•ЁлҗҳлҸ„лЎқ мқҙлҸҷмӢңнӮЁ xмқҳ 집합мқҙ лҗңлӢӨ.
м—¬кё°м„ң, OлҠ” мһ…л Ҙлҗң мқҙ진мҳҒмғҒмқҳ мўҢн‘ң 집합, вҠ– лҠ” м№ЁмӢқм—°мӮ° кё°нҳё, FлҠ” н•„н„° мҡ”мҶҢмқҳ мўҢн‘ң 집합, FxлҠ” Fмқҳ мӣҗм җмқ„ xлЎң мқҙлҸҷмӢңнӮЁ мўҢн‘ң 집합, OвҖІeлҠ” м№ЁмӢқ м—°мӮ°мқҳ кІ°кіј л“ұмқ„ лӮҳнғҖлӮёлӢӨ.
Fig. 2(a)лҠ” м№ЁмӢқ м—°мӮ°мқҳ мҳҲлҘј лӮҳнғҖлӮё кІғмқҙлӢӨ. 3 Г— 3 м°Ёмӣҗмқҳ н•„н„°(F)лҘј мһ…л Ҙ мҳҒмғҒ(O)мқҳ н•ҙлӢ№мҳҒм—ӯкіј 비көҗн–Ҳмқ„ л•Ң, x1мқҳ мўҢн‘ңм—җм„ңлҠ” к°’мқҙ лӘЁл‘җ мқјм№ҳн•ҳлҜҖлЎң 1мқ„ м¶ңл Ҙн•ҳкі , x2мқҳ мң„м№ҳм—җм„ңлҠ” лӘЁл‘җ мқјм№ҳн•ҳм§Җ м•Ҡкё° л•Ңл¬ём—җ 0мқ„ м¶ңл Ҙн•ңлӢӨ. мқҙлҠ” л§Ҳм№ҳ лӘЁл“ мЎ°кұҙмқҙ м°ё(true)мқј л•Ңл§Ң м°ёмңјлЎң мІҳлҰ¬н•ҳлҠ” AND м—°мӮ°кіј мң мӮ¬н•ҳл©°, н•„н„°м—җ мқҳн•ҙм„ң м¶ңл ҘмҳҒмғҒмқҙ 1мқҙ лҗҳлҠ” лІ”мң„к°Җ мһ…л ҘмҳҒмғҒмқҙ 1мқҙ лҗҳлҠ” лІ”мң„мҷҖ 비көҗн•ҳм—¬ 축мҶҢ(мҰү, м№ЁмӢқ)лҗңлӢӨ.
2) нҢҪм°Ҫ м—°мӮ°(Dilation operation)
нҢҪм°Ҫ м—°мӮ°мқҖ лӢӨмқҢ мӢқ(3b)мңјлЎң лӮҳнғҖлӮј мҲҳ мһҲлӢӨ. нҢҪм°Ҫ м—°мӮ°мқҳ кІ°кіј(OвҖІd)лҠ” Fxмқҳ лӘЁл“ мўҢн‘ңк°Җ Oм—җ нҸ¬н•ЁлҗҳлҸ„лЎқ мқҙлҸҷмӢңнӮЁ xмқҳ 집합мқҙ лҗңлӢӨ.
м—¬кё°м„ң, вҠ• лҠ” нҢҪм°Ҫм—°мӮ°мқҳ кё°нҳёлҘј лӮҳнғҖлӮёлӢӨ.
Fig. 2(b)лҠ” нҢҪм°Ҫ м—°мӮ°мқҳ мҳҲлҘј лӮҳнғҖлӮё лӢӨ. 3 Г— 3 мқҳ н•„н„°(F) лҘј мһ…л Ҙ мҳҒмғҒ(O)мқҳ н•ҙлӢ№мҳҒм—ӯкіј 비көҗн•ҳмҳҖмқ„ л•Ң, x1мқҳ мўҢн‘ңм—җм„ңлҠ” н•ң к°ң мқҙмғҒ мқјм№ҳн•ҳкё° л•Ңл¬ём—җ 1мқ„ м¶ңл Ҙн•ҳкі , x2мқҳ мўҢн‘ңм—җм„ңлҠ” лӘЁл‘җ мқјм№ҳн•ҳм§Җ м•Ҡкё° л•Ңл¬ём—җ 0мқ„ м¶ңл Ҙн•ңлӢӨ. мқҙлҠ” л§Ҳм№ҳ мЎ°кұҙ мӨ‘ н•ҳлӮҳл§Ң м°ёмқҙм–ҙлҸ„ м°ёмңјлЎң мІҳлҰ¬н•ҳлҠ” OR м—°мӮ°кіј мң мӮ¬н•ҳл©°, н•„н„°м—җ мқҳн•ҙм„ң м¶ңл ҘмҳҒмғҒмқҙ 1мқҙ лҗҳлҠ” лІ”мң„к°Җ мһ…л ҘмҳҒмғҒмқҙ 1мқҙ лҗҳлҠ” лІ”мң„мҷҖ 비көҗн•ҳм—¬ нҷ•лҢҖ(мҰү, нҢҪм°Ҫ)лҗңлӢӨ.
3) м—ҙлҰј м—°мӮ°(Openning operation)
м—ҙлҰј м—°мӮ°мқҖ лӢӨмқҢ мӢқ(3c)кіј к°ҷмқҙ м№ЁмӢқ м—°мӮ°( вҠ– )мқ„ лЁјм Җ мҲҳн–үн•ҳкі к·ё м¶ңл Ҙ мҳҒмғҒм—җ нҢҪм°Ҫ м—°мӮ°(вҠ•)мқ„ мҲҳн–үн•ңлӢӨ.
м—¬кё°м„ң, вҲҳ лҠ” м—ҙлҰј м—°мӮ°мқ„ лӮҳнғҖлӮёлӢӨ.
Fig. 2(c)лҠ” м—ҙлҰј м—°мӮ°мқҳ мҳҲлҘј лӮҳнғҖлӮё кІғмңјлЎң, мғҒлӢЁ к·ёлҰјмқҖ мһ…л Ҙ мҳҒмғҒм—җ лҢҖн•ң м№ЁмӢқ м—°мӮ° м Ҳм°ЁмҷҖ кІ°кіјлҘј лӮҳнғҖлӮҙкі , н•ҳлӢЁ к·ёлҰјмқҖ м№ЁмӢқ м—°мӮ°мқҳ м¶ңл ҘмҳҒмғҒм—җ лҢҖн•ң нҢҪм°Ҫ м—°мӮ°мқҳ м Ҳм°ЁмҷҖ кІ°кіј(OвҖІo)лҘј лӮҳнғҖлӮёлӢӨ. мқҙлҹ¬н•ң м—ҙлҰј м—°мӮ°м—җ мқҳн•ҙм„ң кө¬мЎ°к°Җ л„“кІҢ м—°кІ°лҗң мһ…л ҘмҳҒмғҒ л¶Җ분мқҖ м¶ңл ҘмҳҒмғҒм—җм„ң мң м§ҖлҗЁкіј лҸҷмӢңм—җ мўҒкІҢ м—°кІ°лҗң л¶Җ분мқҙ м ңкұ°лҗЁмқ„ ліј мҲҳ мһҲлӢӨ.
4) лӢ«нһҳ м—°мӮ°(Closing operation)
лӢ«нһҳ м—°мӮ°мқҖ м—ҙлҰј м—°мӮ°кіј мң мӮ¬н•ҳкІҢ м№ЁмӢқ м—°мӮ°кіј нҢҪм°Ҫ м—°мӮ°мқ„ лӘЁл‘җ мӮ¬мҡ©н•ҳм§Җл§Ң, м—ҙлҰј м—°мӮ°кіј лӢ¬лҰ¬, мӢқ (3d)кіј к°ҷмқҙ нҢҪм°Ҫ м—°мӮ°(вҠ•)мқ„ лЁјм Җ мҲҳн–үн•ҳкі , к·ё м¶ңл Ҙ мҳҒмғҒм—җ м№ЁмӢқ м—°мӮ°(вҠ–)мқ„ мҲҳн–үн•ңлӢӨ.
Fig. 2(d)лҠ” лӢ«нһҳ м—°мӮ°(Closing operation)мқҳ мҳҲлҘј лӮҳнғҖлӮё кІғмңјлЎң, нҢҪм°Ҫм—°мӮ°мқ„ мҲҳн–үн•ң мқҙнӣ„ м№ЁмӢқм—°мӮ° кІ°кіј(OвҖІc)лҘј лӮҳнғҖлӮёлӢӨ. мқҙлҹ¬н•ң лӢ«нһҳ м—°мӮ°м—җ мқҳн•ҙм„ң мһ…л ҘмҳҒмғҒм—җм„ң мўҒкІҢ м—°кІ°лҗҳм–ҙ мһҲлҚҳ л¶Җ분л“Өмқҙ м¶ңл ҘмҳҒмғҒм—җм„ңлҠ” нҷ•лҢҖлҗҳм–ҙ лӮҙл¶ҖмҷҖ мңӨкіҪ л¶Җ분мқҳ л№Ҳ кіімқҙ мұ„мӣҢм§җмқ„ ліј мҲҳ мһҲлӢӨ.
3. мӢӨн—ҳ л°Ҹ кІ°кіј
3.1 мӢӨн—ҳ м Ҳм°Ё
Fig. 4лҠ” м•„лӮ лЎңк·ё кІҢмқҙм§Җмқҳ мҳҒмғҒм—җм„ң м§ҖмӢңл°”лҠҳ к°қмІҙмқҳ мӢқлі„мқ„ мң„н•ң мӢӨн—ҳ м Ҳм°ЁлҘј лӮҳнғҖлӮёлӢӨ. мӢӨн—ҳ м Ҳм°ЁлҠ” л‘җ л¶Җ분мңјлЎң кө¬л¶„н•ҳмҳҖлҠ”лҚ°, н•ҳлӮҳлҠ” м•„лӮ лЎңк·ё кІҢмқҙм§Җ мҳҒмғҒмқҳ мӮ¬м „мІҳлҰ¬ л¶Җ분мқҙкі , лӢӨлҘё н•ҳлӮҳлҠ” мӮ¬м „мІҳлҰ¬ лҗң мҳҒмғҒм—җм„ң м§ҖмӢңл°”лҠҳ к°қмІҙлҘј мӢқлі„н•ҳлҠ” л¶Җ분мқҙлӢӨ.
лЁјм Җ, мҳҒмғҒмқҳ мӮ¬м „мІҳлҰ¬ кіјм •мқҖ лӢӨмқҢкіј к°ҷлӢӨ.
лӢЁкі„ 1: 컬лҹ¬лЎң мҙ¬мҳҒн•ң м•„лӮ лЎңк·ё кІҢмқҙм§Җмқҳ мҳҒмғҒмқ„ мқҙ진мІҳлҰ¬лҘј нҶөн•ҙм„ң нқ‘л°ұмҳҒмғҒмңјлЎң ліҖнҷҳн•ңлӢӨ.
лӢЁкі„ 2: нқ‘л°ұмҳҒмғҒм—җ к°Җмҡ°мӢңм•Ҳ н•„н„°лҘј м Ғмҡ©н•ҳм—¬ мһЎмқҢмқ„ м ңкұ°н•ңлӢӨ.
лӢЁкі„ 3: мһЎмқҢмқҙ м ңкұ°лҗң мҳҒмғҒмқ„ мһ„кі„мІҳлҰ¬н•ҳм—¬ л°°кІҪкіј кІҢмқҙм§Җмқҳ к°қмІҙл“Өмқ„ лӘ…нҷ•н•ҳкІҢ кө¬л¶„н•ңлӢӨ.
лӢЁкі„ 4: мһ„кі„мІҳлҰ¬ мҳҒмғҒм—җ лӘЁнҸҙлЎңм§Җ м—°мӮ°мқ„ м Ғмҡ©н•ҳм—¬ м§ҖмӢңл°”лҠҳ к°қмІҙмқҳ нҳ•мғҒмқ„ лӢЁмҲңнҷ”мӢңнӮӨкі м§ҖмӢңл°”лҠҳ к°қмІҙ мқҙмҷёмқҳ к°қмІҙл“ӨмқҖ мһЎмқҢмңјлЎң к°„мЈјн•ңлӢӨ.
лӢӨмқҢмңјлЎң, мң„мқҳ 4 лӢЁкі„лҘј нҶөн•ҙ мІҳлҰ¬лҗң мҳҒмғҒм—җм„ң м§ҖмӢңл°”лҠҳмқҳ к°қмІҙмӢқлі„ м Ҳм°ЁлҠ” лӢӨмқҢкіј к°ҷлӢӨ.
лӢЁкі„ 1: мӮ¬м „мІҳлҰ¬к°Җ лҗң кІҢмқҙм§Җ мҳҒмғҒм—җм„ң кІҢмқҙм§Җмқҳ мӨ‘мӢ¬м җмқ„ мӢқлі„н•ңлӢӨ. мқҙ мһ‘м—…мқ„ нҶөн•ҙ кІҢмқҙм§Җмқҳ мӨ‘мӢ¬м җм—җ мһҲлҠ” м§ҖмӢңл°”лҠҳмқҳ мӣҗм җмқ„ мӢқлі„н•ңлӢӨ.
лӢЁкі„ 2: мӢқлі„н•ң кІҢмқҙм§Җмқҳ мӨ‘мӢ¬м җмңјлЎңл¶Җн„° м§ҖмӢңл°”лҠҳ к°қмІҙлҘј мӢқлі„н•ңлӢӨ.
3.2 мӢӨн—ҳ мһҘм№ҳ кө¬м¶•
мӢӨн—ҳ мһҘм№ҳлҠ” 비мғҒмҶҢнҷ”нҺҢн”„ лӘЁнҳ•мқ„ мқҙмҡ©н•ҳмҳҖлҠ”лҚ°, мқҙ 비мғҒмҶҢнҷ”нҺҢн”„ лӘЁнҳ•мқҖ н•ңкөӯн•ҙм–‘лҢҖн•ҷкөҗ мӢӨмҠөм„ н•ңлӮҳлқј(L, 121.78 m; B, 19.40 m; D, 11.05 m; G.T, 9,196 ton)м—җ м„Өм№ҳлҗң 비мғҒмҶҢнҷ”нҺҢн”„мқҳ л°°кҙҖлҸ„л©ҙмқ„ мқҙмҡ©н•ҳм—¬ м—°кө¬мһҗк°Җ м ңмһ‘н•ң кІғмқҙлӢӨ. 비мғҒмҶҢнҷ”нҺҢн”„лҠ” кё°кҙҖкө¬м—ӯм—җ м„Өм№ҳлҗң мЈј(main) мҶҢнҷ”нҺҢн”„м—җ л¬ём ңк°Җ л°ңмғқн• кІҪмҡ°лҘј лҢҖ비н•ҳкё° мң„н•ң кІғмңјлЎң, мЈј мҶҢнҷ”нҺҢн”„к°Җ м„Өм№ҳлҗң кө¬м—ӯмқҳ мҷёл¶Җ кө¬м—ӯм—җ м„Өм№ҳн•ҳм—¬ м–ҙл– н•ң мғҒнҷ©м—җм„ңлҸ„ м„ л°•мқҳ нҷ”мһ¬лҘј 진압н•ҳкё° мң„н•ң мҶЎмҲҳмҡ© нҺҢн”„лЎңм„ң м„ кёүкІҖмӮ¬мқҳ лҢҖн‘ңм Ғмқё кІҖмӮ¬лҢҖмғҒмқҙлӢӨ(Korean Register, 2023c).
мқҙлҹ¬н•ң 비мғҒмҶҢнҷ”нҺҢн”„лҠ” 비мғҒмӢң мһ‘лҸҷн• мҲҳ мһҲлҸ„лЎқ н•ӯмғҒ мһ‘лҸҷмғҒнғңлҘј мң м§Җн•ҙм•ј н•ңлӢӨ. 비мғҒмҶҢнҷ”нҺҢн”„мқҳ мһ‘лҸҷм—¬л¶Җмқҳ нҢҗлӢЁ л°©лІ•мқҖ, к°‘нҢҗ мң„м—җ л‘җ мӨ„кё° мӮ¬мҲҳмқҳ к°ҖлҠҘ м—¬л¶ҖмҷҖ нҶ м¶ң м••л ҘмқҙлӢӨ. SOLASлҠ” лӘЁл“ мҶҢнҷ”м „мқҳ мөңмҶҢ м••л Ҙ 0.40 MPa(4000 нҶӨ мқҙмғҒмқҳ м—¬к°қм„ кё°мӨҖ)мқ„ мҡ”кө¬н•ҳкі мһҲмңјл©°, кё°мӨҖ мқҙмғҒмқҳ мҲҳм••мқҙ нҳ•м„ұлҗҳлҠ” кІҪмҡ° 비мғҒмҶҢнҷ”нҺҢн”„к°Җ м •мғҒ мһ‘лҸҷн•ҳлҠ” кІғмңјлЎң к·ңм •н•ҳкі мһҲлӢӨ(SOLAS, 2002).
Fig. 5лҠ” м•„лӮ лЎңк·ё кІҢмқҙм§Җк°Җ л¶Җм°©лҗң 비мғҒмҶҢнҷ”нҺҢн”„мқҳ лӘЁнҳ•мқ„ лӮҳнғҖлӮёлӢӨ. лӘЁнҳ•мқҳ кө¬мЎ°мҷҖ мһ‘лҸҷмғҒнғңлҘј м„ӨлӘ…н•ҳл©ҙ лӢӨмқҢкіј к°ҷлӢӨ. лЁјм Җ 비мғҒмҶҢнҷ”нҺҢн”„(a)лҘј к°ҖлҸҷн•ҳл©ҙ нғұнҒ¬(b)м—җ мұ„мӣҢ진 н•ҙмҲҳк°Җ к°Ғмў… нҢҢмқҙн”„лқјмқё(c)мқ„ кұ°міҗм„ң мӮ¬к°Ғ л°•мҠӨлЎң л¬ҳмӮ¬н•ң к°‘нҢҗ(d)мңјлЎң л°°м¶ңлҗҳкі , мқҙл•Ң к°Ғ нҢҢмқҙн”„лқјмқём—җ нҳ•м„ұлҗҳлҠ” мҲҳм••мқҙ м•„лӮ лЎңк·ё кІҢмқҙм§Җ(e)м—җ н‘ңмӢңлҗңлӢӨ. м•„мҡёлҹ¬ мҳҒмғҒмІҳлҰ¬ ліҙл“ңм—җм„ң м•„лӮ лЎңк·ё кІҢмқҙм§Җмқҳ мҳҒмғҒмқ„ мҙ¬мҳҒн•ҳм—¬ мІҳлҰ¬н•ң нӣ„ м§ҖмӢңл°”лҠҳмқҙ лҶ“мқё мң„м№ҳмқҳ мҲҳм••мқ„ мӢқлі„н•ңлӢӨ.
Fig. 6лҠ” мҳҒмғҒмІҳлҰ¬ ліҙл“ңлҘј лӮҳнғҖлӮё кІғмңјлЎң, мҳҒмғҒмІҳлҰ¬ ліҙл“ңлҠ” NVIDIAмӮ¬мқҳ Jetson NanoлҘј мқҙмҡ©н•ҳмҳҖлӢӨ. мҙ¬мҳҒн•ң мҳҒмғҒмқҖ Apache 2.0 лқјмқҙм„ мҠӨ(HAN, 2017)лЎң л°°нҸ¬лҗҳм–ҙ н•ҷмҲ мҡ©лҸ„лЎң мӮ¬мҡ©н• мҲҳ мһҲлҠ” мҳӨн”ҲмҶҢмҠӨ м»ҙн“Ён„° л№„м „ лқјмқҙлёҢлҹ¬лҰ¬(Open Source Computer Vision Library, OpenCV) н”„лЎңк·ёлһЁмқ„ мқҙмҡ©н•ҳм—¬ мІҳлҰ¬н•ҳмҳҖлӢӨ. Table 1мқҖ мҳҒмғҒмІҳлҰ¬ ліҙл“ңмқё Jetson Nanoмқҳ м ңмӣҗмқ„ лӮҳнғҖлӮҙл©°, мҳҒмғҒмІҳлҰ¬м—җ мӮ¬мҡ©лҗң м№ҙл©”лқјмқҳ мғҒм„ёлҠ” Table 2мҷҖ к°ҷлӢӨ(NVIDIA, 2023).
3.3 мҳҒмғҒ мӮ¬м „мІҳлҰ¬ кІ°кіј
Fig. 6мқҳ (a)л¶Җн„° (d)к№Ңм§ҖлҠ” м•„лӮ лЎңк·ё кІҢмқҙм§Җмқҳ мӮ¬м „ мҳҒмғҒмІҳлҰ¬ кІ°кіјлҘј лӮҳнғҖлӮёлӢӨ.
Fig. 6(a)мқҖ 비мғҒмҶҢнҷ”нҺҢн”„ лӘЁнҳ•м—җ л¶Җм°©лҗң м•„лӮ лЎңк·ё кІҢмқҙм§ҖлҘј мҳҒмғҒмІҳлҰ¬ ліҙл“ңм—җм„ң мҙ¬мҳҒн•ң мӣҗліё 컬лҹ¬мҳҒмғҒмқ„ лӮҳнғҖлӮё кІғмңјлЎң, 비мғҒмҶҢнҷ”нҺҢн”„лҘј мһ‘лҸҷн•ҳм§Җ м•ҠмқҖ мғҒнғңм—җм„ң мҙ¬мҳҒн•ң кІғмқҙлӢӨ. м•„лӮ лЎңк·ё кІҢмқҙм§ҖлҠ” 0.0 MPaл¶Җн„° 1.0 MPaк№Ңм§Җмқҳ мҲҳм••лІ”мң„к°Җ 20 лӢЁкі„лЎң кө¬л¶„лҗң кІғмңјлЎң, 1к°ңмқҳ лҲҲкёҲмқҖ 0.05 MPaм—җ н•ҙлӢ№н•ңлӢӨ. к·ёлҰјм—җ лӮҳнғҖлӮё 컬лҹ¬мҳҒмғҒм—җм„ң м•„лӮ лЎңк·ё кІҢмқҙм§ҖмҷҖ л°°кІҪмқҙ нҳјн•©лҗҳм–ҙ мһҲмқҢмқ„ ліј мҲҳ мһҲкі , нқ‘мғүмқҳ м§ҖмӢңл°”лҠҳмқҖ 0.0 MPaлҘј лӮҳнғҖлӮҙкі мһҲлӢӨ.
Fig. 6(b)мқҖ мқҙ진мІҳлҰ¬лҘј нҶөн•ҙм„ң нқ‘л°ұ мқҙлҜём§ҖлЎң ліҖнҷҳмӢңнӮҙкіј лҸҷмӢңм—җ к°Җмҡ°мӢңм•Ҳ н•„н„°лҘј м Ғмҡ©н•ҳм—¬ мһЎмқҢмқ„ м ңкұ°н•ң кІ°кіјлҘј лӮҳнғҖлӮёлӢӨ. мҳҒмғҒмІҳлҰ¬лҘј н–ҲмқҢм—җлҸ„ л¶Ҳкө¬н•ҳкі , лӢӨм–‘н•ң л°°кІҪ к°қмІҙ(м§Ғм„ нҳ•мғҒ, н”Ңлһңм§Җмқҳ мӣҗнҳ• нҳ•мғҒ л“ұ)к°Җ лӮЁм•„мһҲмқҢмқ„ ліј мҲҳ мһҲлӢӨ. мқҙлҹ¬н•ң л°°кІҪ к°қмІҙл“ӨмқҖ мһ„кі„мІҳлҰ¬лҘј нҶөн•ҙм„ң м ңкұ°н•ҳмҳҖлӢӨ.
Fig. 6(c)мқҖ мһ„кі„мІҳлҰ¬ кІ°кіјлҘј лӮҳнғҖлӮёлӢӨ. мӣҗн•ҳм§Җ м•ҠлҠ” л°°кІҪ к°қмІҙл“Өмқҙ мӮӯм ңлҗЁм—җ л”°лқј кІҢмқҙм§Җмқҳ лҲҲкёҲкіј мҲ«мһҗ, м§ҖмӢңл°”лҠҳ, кІҢмқҙм§Җмқҳ мҷёкІҪ л“ұмқҙ м„ лӘ…н•ҙмЎҢмқҢмқ„ ліј мҲҳ мһҲлӢӨ. к·ёлҹ¬лӮҳ к·ёлҰј Fig. 6(b)мқҳ к°Җмҡ°мӢңм•Ҳ н•„н„°лҘј м Ғмҡ©н–Ҳмқ„ л•Ң мһҳ ліҙмқҙм§Җ м•Ҡм•ҳлҚҳ кІҢмқҙм§Җ лӮҙкІҪ л¶Җ분мқҳ к·ёлҰјмһҗмҷҖ мң лҰ¬м—җ л°ҳмӮ¬лҗң мһ‘мқҖ н”Ҫм…Җ л“ұмқҳ мһЎмқҢмқҙ лӢӨмҲҳ ліҙмқёлӢӨ. мқҙлҹ¬н•ң мһЎмқҢмқҖ лӘЁнҸҙлЎңм§Җ м—°мӮ°мқ„ нҶөн•ҙ м–өм ңн•ҳмҳҖлӢӨ.
Fig. 6(d)мқҖ лӘЁнҸҙлЎңм§Җ м—°мӮ° кІ°кіјлҘј лӮҳнғҖлӮёлӢӨ. лӢӨмҲҳмқҳ мһЎмқҢмқҙ м ңкұ°лҗң кІ°кіј лҲҲкёҲкіј м§ҖмӢңл°”лҠҳмқҙ лҚ”мҡұ лӘ…нҷ•н•ҳкІҢ лӮҳнғҖлӮЁмқ„ ліј мҲҳ мһҲлӢӨ.
3.4 м§ҖмӢңл°”лҠҳ к°қмІҙ мӢқлі„ кІ°кіј
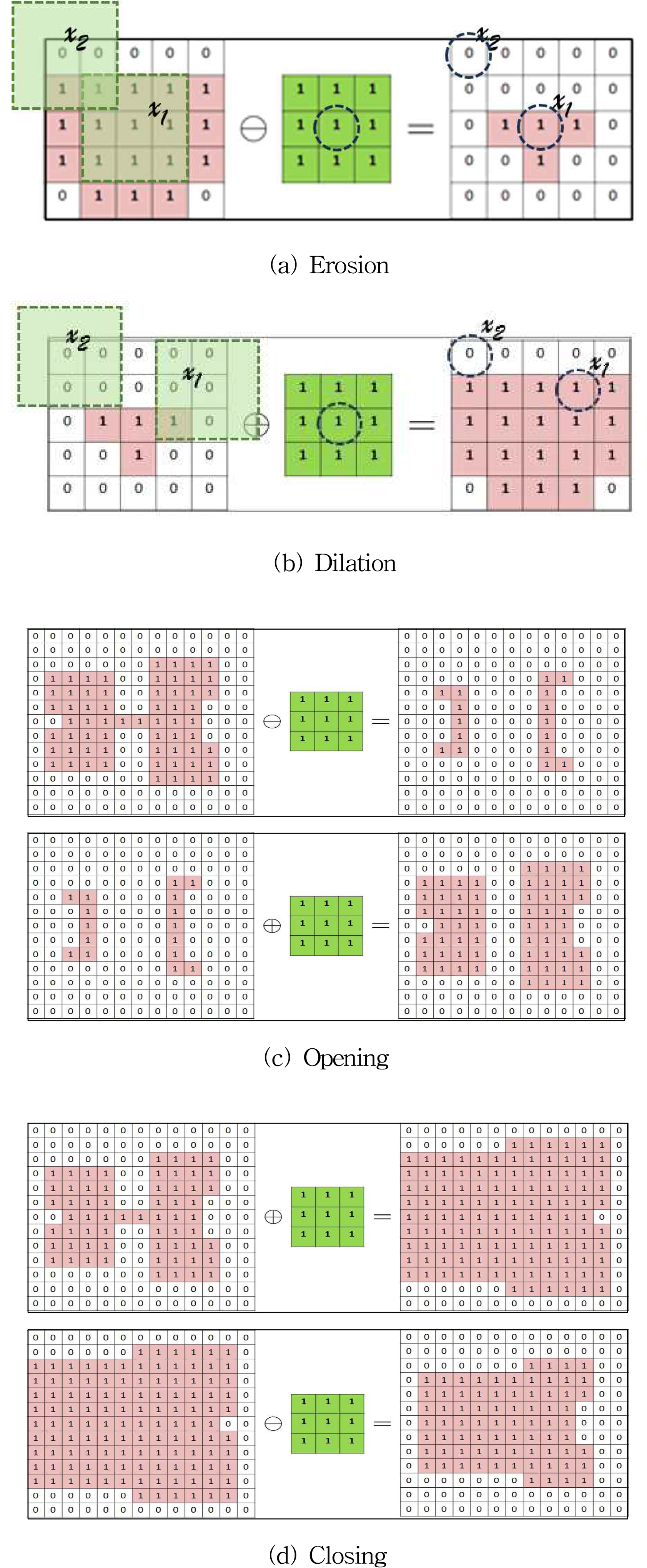
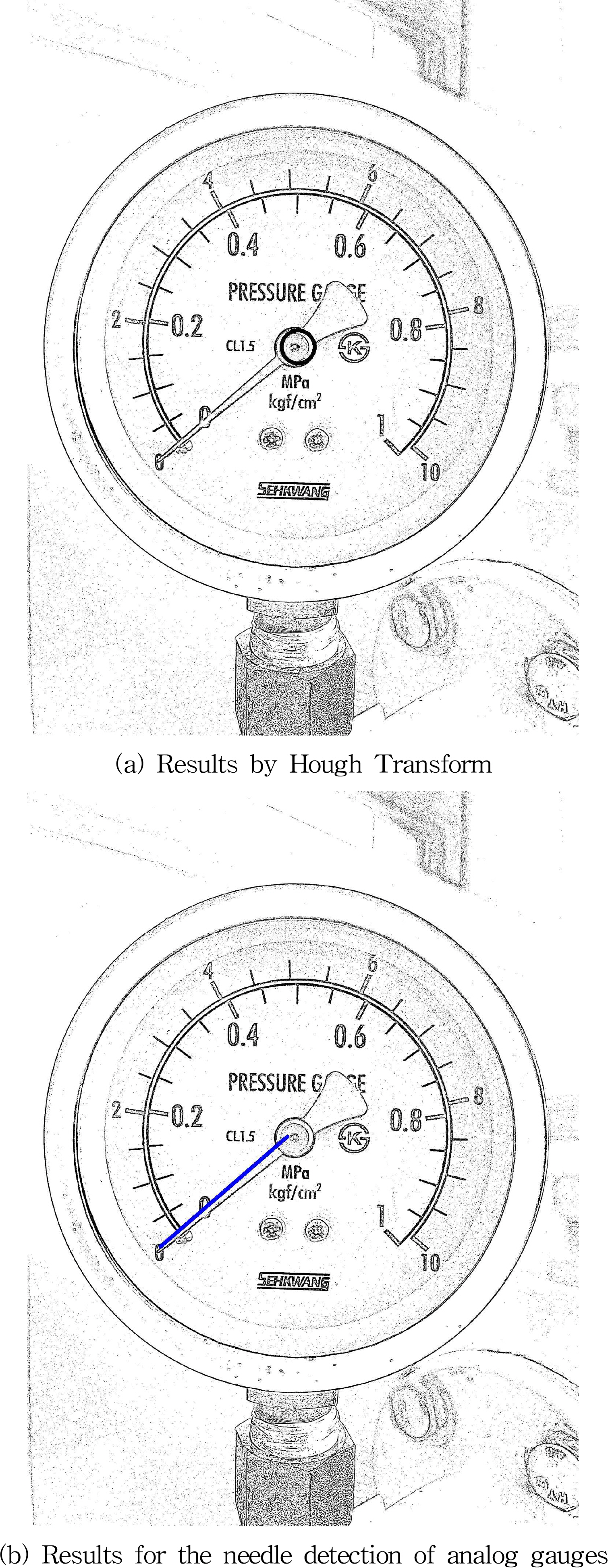
Fig. 7мқҳ (a)мҷҖ (b)лҠ” м§ҖмӢңл°”лҠҳ к°қмІҙ мӢқлі„кІ°кіјлҘј лӮҳнғҖлӮёлӢӨ.
Fig. 7(a)мқҖ н—Ҳн”„ ліҖнҷҳмқ„ нҶөн•ҙм„ң кІҢмқҙм§Җмқҳ мӨ‘мӢ¬м җмқ„ мӢқлі„н•ң кІ°кіјлҘј лӮҳнғҖлӮёлӢӨ. мқҙлҹ¬н•ң мӨ‘мӢ¬м җмқҖ кІҢмқҙм§Җмқҳ мӨ‘м•ҷм—җ лӮҳнғҖлӮң м§ҖмӢңл°”лҠҳ мӨ‘мӢ¬мқҳ мӣҗнҳ• к°қмІҙлҘј мӢқлі„н•ҳкё° мң„н•ң кІғмқҙлӢӨ. мӢқлі„кІ°кіјлҠ” м§ҖмӢңл°”лҠҳ мӨ‘мӢ¬мқҳ мӣҗнҳ• к°қмІҙм—җ көөмқҖ нқ‘мғүмқҳ мӣҗмңјлЎң лӮҳнғҖлғҲлӢӨ. к·ёлҰјмқ„ ліҙл©ҙ, л°°кІҪм—җ кІҢмқҙм§Җ мӨ‘мӢ¬мқҳ мӣҗнҳ• нҳ•мғҒкіј мң мӮ¬н•ң нҳ•нғңмқҳ мҲ«мһҗ вҖҳ0вҖҷ, л¬ёмһҗ вҖҳpвҖҷ, лҸҷк·ёлһҖ ліјнҠё мһҗкөӯ, к·ёлҰ¬кі мӣҗнҳ•мқҳ вҖҳKSл§ҲнҒ¬вҖҷ л“ұмқҙ лӮҳнғҖлӮ¬мқҢм—җлҸ„ л¶Ҳкө¬н•ҳкі м§ҖмӢңл°”лҠҳмқҳ мӨ‘мӢ¬ к°қмІҙк°Җ м„ лӘ…н•ҳкІҢ мӢқлі„лҗҳм—ҲмқҢмқ„ ліј мҲҳ мһҲлӢӨ.
м—¬кё°м„ң, кІҢмқҙм§Җмқҳ мӨ‘мӢ¬м җмқ„ м°ҫлҠ” мқҙмң лҠ” м••л Ҙм—җ мқҳн•ҙм„ң ліҖлҸҷн•ҳлҠ” м§ҖмӢңл°”лҠҳмқҳ мң„м№ҳлҘј м •нҷ•н•ҳкІҢ мӢқлі„н•ҳкё° мң„н•ң кІғмқҙлӢӨ. м„ л°•м—җм„ң мқјл°ҳм ҒмңјлЎң мӮ¬мҡ©н•ҳлҠ” л¶ҖлЈЁлҸҷ-кҙҖ м••л Ҙкі„(Bourdon tube pressure gauge)лҠ” м••л Ҙмқҙ к°Җн•ҙм§Җл©ҙ л¶ҖлЈЁлҸҷ-кҙҖмқҳ ліҖнҳ•м •лҸ„к°Җ м§ҖмӢңл°”лҠҳмқҳ мӨ‘мӢ¬м җмқ„ кё°мӨҖмңјлЎң лҲҲкёҲнҢҗ мң„м—җ н‘ңмӢңлҗҳлҠ” л°©мӢқмқҙлӢӨ. к·ёлһҳм„ң лҲҲкёҲнҢҗм—җ лӮҳнғҖлӮң мҲ«мһҗ(мҰү, м••л Ҙ)лҘј м •нҷ•н•ҳкІҢ нҢҗлҸ…н•ҳкё° мң„н•ҙм„ңлҠ” м§ҖмӢңл°”лҠҳмқҳ мӨ‘мӢ¬м—җм„ңл¶Җн„° м§ҖмӢңл°”лҠҳмқҳ лҒқл¶Җ분к№Ңм§Җмқҳ к°қмІҙмӢқлі„мқҙ н•„мҡ”н•ҳкё° л•Ңл¬ём—җ мҡ°м„ н•ҳм—¬ м§ҖмӢңл°”лҠҳмқҳ мӨ‘мӢ¬м җмқ„ мӢқлі„н•ҳлҠ” кІғмқҙлӢӨ.
Fig. 7(b)мқҖ м§ҖмӢңл°”лҠҳ к°қмІҙмқҳ мӢқлі„кІ°кіјлҘј лӮҳнғҖлӮёлӢӨ. мӢқлі„кІ°кіјлҠ” м§ҖмӢңл°”лҠҳ к°қмІҙ мң„м—җ мІӯмғүмқҳ көөмқҖ м„ мңјлЎң лӮҳнғҖлғҲлӢӨ. мқҙ кІ°кіјлҠ” н—Ҳн”„ ліҖнҷҳмқ„ нҶөн•ҙ кІҖм¶ңн•ң м§ҖмӢңл°”лҠҳмқҳ м§Ғм„ к°қмІҙлҘј мқҙмҡ©н•ң кІғмңјлЎң, м§ҖмӢңл°”лҠҳмқҳ мӨ‘мӢ¬м җмңјлЎңл¶Җн„° лҒқл¶Җ분к№Ңм§Җ м •нҷ•н•ҳкІҢ мӢқлі„лҗҳм—ҲмқҢмқ„ ліј мҲҳ мһҲлӢӨ.
мқҙлҹ¬н•ң мҳҒмғҒмІҳлҰ¬кіјм •мқ„ нҶөн•ҙм„ң м•„лӮ лЎңк·ё кІҢмқҙм§Җмқҳ м§ҖмӢңл°”лҠҳ к°қмІҙлҘј лӘ…нҷ•н•ҳкІҢ мӢқлі„н• мҲҳ мһҲмқҢмқ„ нҷ•мқён•ҳмҳҖлӢӨ. к·ё кІ°кіј ліё м—°кө¬м—җм„ң м Ғмҡ©н•ң мҳҒмғҒмІҳлҰ¬л°©лІ•мқҖ м„ л°•м—җ мһҘм°©лҗң 비мғҒмҶҢнҷ”нҺҢн”„ м••л Ҙ кІҢмқҙм§Җмқҳ м§ҖмӢңл°”лҠҳ к°қмІҙмқҳ кІҖм¶ңкіј мӢқлі„м—җ мң мҡ©н•ҳкІҢ м Ғмҡ©лҗ мҲҳ мһҲмқҢмқ„ м•Ңм•ҳлӢӨ.
4. кІ° лЎ
ліё м—°кө¬м—җм„ңлҠ” м„ л°•мҡ© 비мғҒмҶҢнҷ”нҺҢн”„м—җ мһҘм°©лҗң м•„лӮ лЎңк·ё кІҢмқҙм§Җм—җм„ң м§ҖмӢңл°”лҠҳмқҳ нҳ•мғҒмқ„ мҳҒмғҒмІҳлҰ¬лҘј нҶөн•ҙм„ң мӢқлі„н•ҳкё° мң„н•ң л°©лІ•мқ„ м ңм•Ҳн•ҳмҳҖлӢӨ. мӢӨм ң м„ л°•нҷҳкІҪкіј мң мӮ¬н•ҳкІҢ м ңмһ‘н•ң 비мғҒмҶҢнҷ”нҺҢн”„ лӘЁнҳ•м—җ мҳҒмғҒмІҳлҰ¬ ліҙл“ңлҘј мһҘм°©н•ҳм—¬ кө¬м„ұн•ң мӢӨн—ҳ мһҘм№ҳлҘј мқҙмҡ©н•ҳм—¬ мӢӨн—ҳн•ң кІ°кіјлҠ” лӢӨмқҢкіј к°ҷлӢӨ.
мІ«м§ё, к°Җмҡ°мӢңм•Ҳ н•„н„°, мһ„кі„мІҳлҰ¬, лӘЁнҸҙлЎңм§Җ м—°мӮ° л“ұмқ„ лӢЁкі„лі„лЎң м Ғмҡ©н•ң мҳҒмғҒмІҳлҰ¬ кіјм •кіј л°©лІ•мқҖ м•„лӮ лЎңк·ё кІҢмқҙм§Җмқҳ мӨ‘мӢ¬мӣҗкіј м§ҖмӢңл°”лҠҳмқҳ мӢқлі„м—җ м Ғн•©н•Ёмқ„ нҷ•мқён•ҳмҳҖлӢӨ.
л‘ҳм§ё, к°Җмҡ°мӢңм•Ҳ н•„н„°м—җ мқҳн•ҙм„ң мһЎмқҢмқҙ м–өм ңлҗ мҲҳ мһҲмқҢмқ„ нҷ•мқён•ҳмҳҖлӢӨ.
м…Ӣм§ё, мһ„кі„мІҳлҰ¬м—җ мқҳн•ҙм„ң мҳҒмғҒм—җ нҸ¬н•Ёлҗң л°°кІҪкіј м§ҖмӢңл°”лҠҳ к°қмІҙмқҳ лӘ…нҷ•н•ң кө¬л¶„мқҙ к°ҖлҠҘн•Ёмқ„ нҷ•мқён•ҳмҳҖлӢӨ.
л„·м§ё, лӘЁнҸҙлЎңм§Җ м—°мӮ°мқ„ нҶөн•ҙ м§ҖмӢңл°”лҠҳ к°қмІҙмқҳ мӨ‘мӢ¬м—җм„ңл¶Җн„° лҒқл¶Җ분к№Ңм§Җ мӢқлі„н• мҲҳ мһҲмқҢмқ„ м•Ңм•ҳлӢӨ.
ліё м—°кө¬лҠ” м§ҖмӢңл°”лҠҳ к°қмІҙ мӢқлі„м—җ м—°кө¬лӘ©м Ғмқ„ л‘” кІғмңјлЎң, н–Ҙнӣ„ м—°кө¬м—җм„ңлҠ” лӢӨм–‘н•ң нҷҳкІҪм—җм„ңмқҳ к°қмІҙ мӢқлі„ л°Ҹ м§ҖмӢңл°”лҠҳмқҙ мң„м№ҳн•ң мҲ«мһҗ(мҰү, м••л Ҙ)мқҳ нҢҗлҸ…м—җ кҙҖн•ҙм„ң м—°кө¬н• мҳҲм •мқҙлӢӨ. мқҙлҹ¬н•ң нҢҗлҸ…мқ„ мң„н•ҙм„ңлҠ” лҚ” м •көҗн•ң кё°мҲ мқҳ м Ғмҡ©кіј к°ңл°ңмқҙ н•„мҡ”н• кІғмңјлЎң кі л ӨлҗңлӢӨ.
ліё м—°кө¬м—җм„ң м ңм•Ҳн•ң л°©лІ•мқҖ м•„лӮ лЎңк·ё кІҢмқҙм§Җлҝҗл§Ң м•„лӢҲлқј м„ л°•м—җ м„Өм№ҳлҗң нҶөн’ҚнҸҗмҮ„мһҘм№ҳ(Fire Damper)мқҳ к°ңнҸҗмғҒнғң, 비мғҒм°ЁлӢЁл°ёлёҢ(Quick Closing Valve)мқҳ мһ‘лҸҷмғҒнғң л“ұмқ„ кІҖмӮ¬н•ҳкё° мң„н•ң лӢӨм–‘н•ң кІҢмқҙм§Җмқҳ мғҒнғң нҢҗлҸ…м—җ м Ғмҡ© к°ҖлҠҘн• кІғмңјлЎң кё°лҢҖлҗңлӢӨ.






 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






