ņä£ ļĪĀ
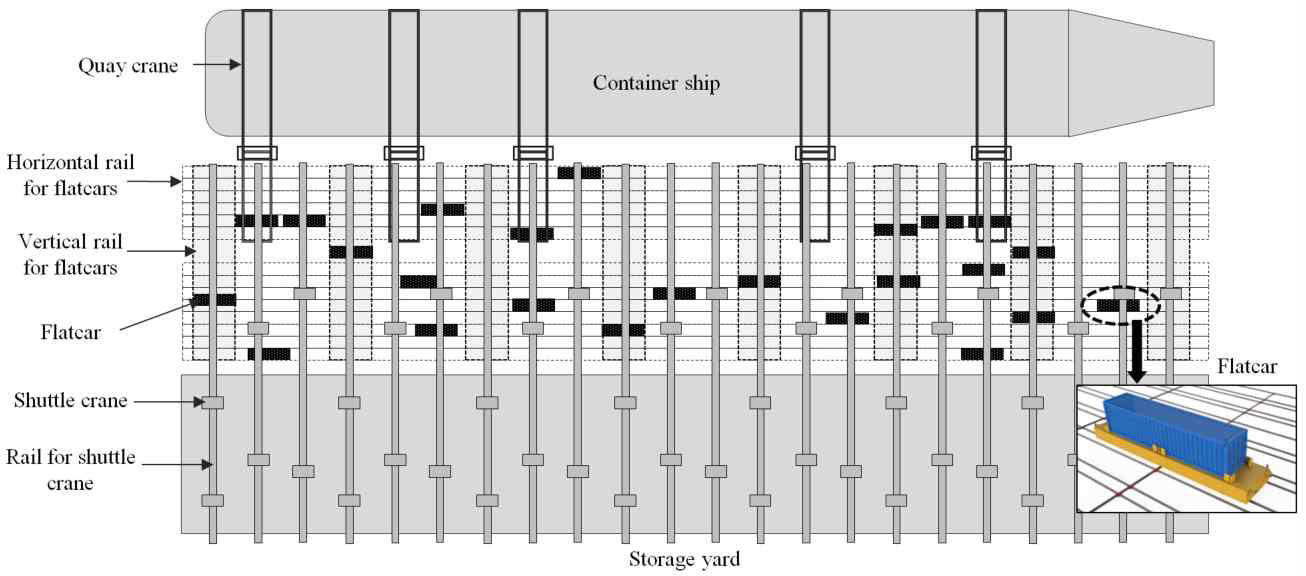
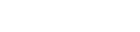
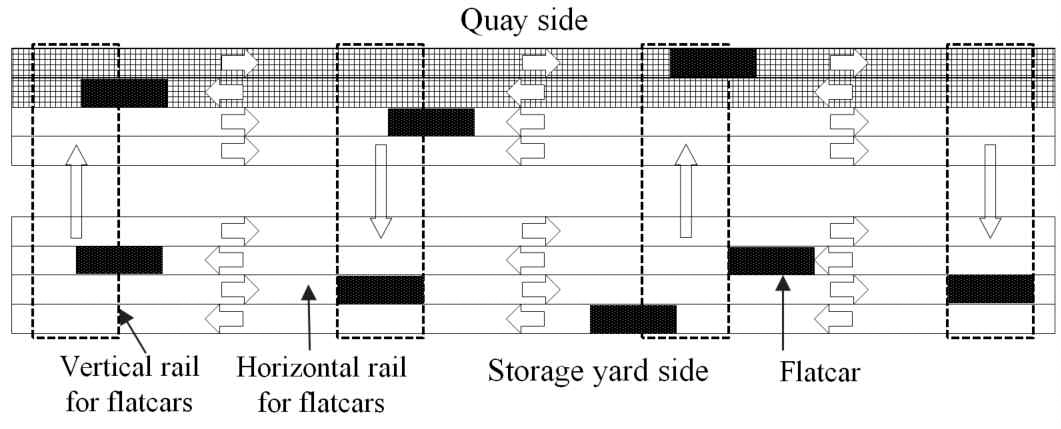
ļĀłņØ╝ĻĖ░ļ░ś ņ╗©ĒģīņØ┤ļäł Ēä░ļ»ĖļäÉņØś ņÜ┤ņśüņŗ£ļéśļ”¼ņśżņÖĆ ņŗ£ļ«¼ļĀłņØ┤ņģś ņŗ£ņŖżĒģ£
2.1. ļĀłņØ╝ĻĖ░ļ░ś ņ╗©ĒģīņØ┤ļäł Ēä░ļ»ĖļäÉņŚÉņä£ņØś ņ╗©ĒģīņØ┤ļäł ņĘ©ĻĖē ņŗ£ļéśļ”¼ņśż
2.2. ņŗ£ļ«¼ļĀłņØ┤ņģś ņŗ£ņŖżĒģ£


Table┬Ā1
| Throughput per call (TEUs) | Number of QCs |
|---|---|
| ~ 1,000 | 3 |
| 1,000 ~ 1,999 | 4 |
| 2,000 ~ 2,999 | 5 |
| 3,000 ~ | 6 |
Ēü¼ļĀłņØĖĻ│╝ ņØ┤ņåĪņןļ╣äĻ░äņØś ĻĄÉņ░®Ļ│╝ ĒĢ┤Ļ▓░ ļ░®ļ▓Ģ
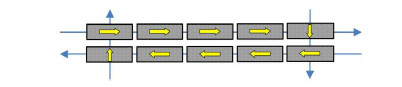
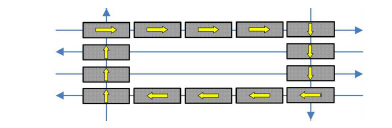
ŌæĀ ņāüĒśĖļ░░ņĀ£(Mutual exclusion) : ĒöäļĪ£ņäĖņŖżļōżņØ┤ ĒĢäņÜöĒĢ£ ņ×É ņøÉņŚÉ ļīĆĒĢ£ ļ░░ĒāĆņĀüņØĖ ĒåĄņĀ£ĻČī ņÜöĻĄ¼
ŌæĪ ņĀÉņ£ĀļīĆĻĖ░(Hold and wait) : ĒöäļĪ£ņäĖņŖżĻ░Ć ĒĢĀļŗ╣ļÉ£ ņ×ÉņøÉņØä Ļ░Ćņ¦ä ņāüĒā£ņŚÉņä£ ļŗżļźĖ ņ×ÉņøÉņØä ĻĖ░ļŗżļ”╝
Ōæó ļ╣äņäĀņĀÉ(No preemption) : ĒöäļĪ£ņäĖņŖżĻ░Ć ņ¢┤ļ¢ż ņ×ÉņøÉņØś ņé¼ņÜ® ņØä ļüØļé╝ ļĢīĻ░Ćņ¦Ć ĻĘĖ ņ×ÉņøÉņØä ļ║ÅņØä ņłś ņŚåņØī
ŌæŻ ņł£ĒÖśļīĆĻĖ░(Circular wait) : Ļ░ü ĒöäļĪ£ņäĖņŖżļŖö ņł£ĒÖśņĀüņ£╝ļĪ£ ļŗż ņØī ĒöäļĪ£ņäĖņŖżĻ░Ć ņÜöĻĄ¼ĒĢśļŖö ņ×ÉņøÉņØä Ļ░Ćņ¦É
3.1. ņĢłļ▓ĮĒü¼ļĀłņØĖĻ│╝ Ēöīļ×½ņ╣┤ ņé¼ņØ┤ņØś ĻĄÉņ░®
3.2. ņģöĒŗĆĒü¼ļĀłņØĖĻ│╝ Ēöīļ×½ņ╣┤ ņé¼ņØ┤ņØś ĻĄÉņ░®
3.2.1. ņĀüĒĢśņģöĒŗĆ-ņ¢æĒĢśĒöīļ×½ņ╣┤ ĻĄÉņ░®
3.2.2. ņĀüĒĢśņģöĒŗĆ-ņĀüĒĢśĒöīļ×½ņ╣┤ ĻĄÉņ░®
3.2.3. ņ¢æĒĢśņģöĒŗĆ-ņ¢æĒĢśĒöīļ×½ņ╣┤ ĻĄÉņ░®
3.2.4. ņ¢æĒĢśņģöĒŗĆ-ņĀüĒĢśĒöīļ×½ņ╣┤ ĻĄÉņ░®
3.3. ņģöĒŗĆĒü¼ļĀłņØĖĻ│╝ Ēöīļ×½ņ╣┤ ņé¼ņØ┤ņØś ĻĄÉņ░® ĒĢ┤Ļ▓░ ļ░®ņĢł
3.3.1. ņ¢æĒĢśņģöĒŗĆ-ņ¢æĒĢśĒöīļ×½ņ╣┤ ĻĄÉņ░®, ņ¢æĒĢśņģöĒŗĆ-ņĀüĒĢśĒöīļ×½ņ╣┤ ĻĄÉņ░® ĒĢ┤Ļ▓░ļ░®ņĢł
3.3.2. ņĀüĒĢśņģöĒŗĆ-ņĀüĒĢśĒöīļ×½ņ╣┤ ĻĄÉņ░® ĒĢ┤Ļ▓░ļ░®ņĢł
3.3.3. ņĀüĒĢśņģöĒŗĆ-ņ¢æĒĢśĒöīļ×½ņ╣┤ ĻĄÉņ░® ĒĢ┤Ļ▓░ļ░®ņĢł
ņØ┤ņåĪņןļ╣äĻ░äņØś ĻĄÉņ░®Ļ│╝ ĻĄÉņ░® ĒĢ┤Ļ▓░ ļ░®ļ▓Ģ
4.1. Ēöīļ×½ņ╣┤ ņØ┤ņåĪņśüņŚŁ ĻĄÉņ░®Ēśäņāü

4.2. ļĀłņØ╝ĻĖ░ļ░ś ņ╗©ĒģīņØ┤ļäł ņØ┤ņåĪņןļ╣ä ĻĄÉņ░®ļ░®ņ¦Ćļź╝ ņ£äĒĢ£ ļ░®ņĢł
4.2.1. ļ¼┤ņ×æņ£ä TP ļĀłņØ╝ Ļ▓░ņĀĢ ĻĘ£ņ╣Ö (Random TP rule)
Table┬Ā2
4.2.2. Ēöīļ×½ņ╣┤ ņłśĒÅēļĀłņØ╝ ļČĆĒĢś ļČäņé░ņØä Ļ│ĀļĀżĒĢ£ TP Ļ▓░ņĀĢ ĻĘ£ņ╣Ö (Workload Distributed TP rule: WDTP rule)
4.2.3. ļŻ©Ēöä ļé┤ Ēöīļ×½ņ╣┤ ņ¦äņ×ģļīĆņłś ņĀ£ĒĢ£ ĻĘ£ņ╣Ö (Maximum No Flatcar in a Loop: MNFL rule)
4.2.4. Ēöīļ×½ņ╣┤ ņłśņ¦üļĀłņØ╝ ņ¦äņ×ģ ņĀ£ĒĢ£ ĻĘ£ņ╣Ö (Vertical Rail Restriction rule: VRR rule)
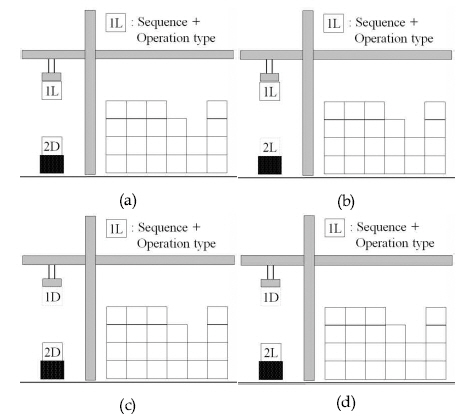
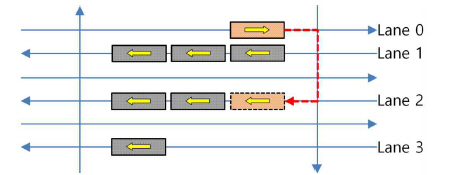
Step 1 : Ēøäļ│┤ ļĀłņØĖļōż (ļĀłņØĖ 1, 2, 3)ļōżņØä ņäĀĒāØĒĢ£ļŗż. Ēøäļ│┤ļĀł ņØĖļōżņØĆ ļ¬®ņĀüņ¦ĆļĪ£ Ļ░ĆļŖöļŹ░ ņĄ£ņåīņŻ╝Ē¢ēĻ▒░ļ”¼ļĪ£ Ļ░ł ņłś ņ׳ļŖö ļĀłņØĖļōżņØ┤ļŗż. ņŻ╝Ē¢ēļĀłņØĖļōżņØ┤ Ļ▓®ņ×ÉĒśĢņ£╝ļĪ£ ļÉśņ¢┤ ņ׳ņ£╝ļ»ĆļĪ£ ļÅÖņØ╝ ņŻ╝Ē¢ēĻ▒░ļ”¼ļź╝ Ļ░Ćņ¦Ć ļŖö Ļ▓ĮļĪ£Ļ░Ć ļ│ĄņłśĻ░£Ļ░Ć ņ׳ņØä ņłśļ░¢ņŚÉ ņŚåļŗż. ļśÉĒĢ£ ņ╗©ĒģīņØ┤ļäłļź╝ ļ░øĻ▒░ļéś ņĀäļŗ¼ĒĢĀ ņģöĒŗĆĒü¼ļĀłņØĖ ļ░æņŚÉļŖö ļÅÖņØ╝ ņģöĒŗĆĒü¼ļĀłņØĖņØ┤ ņĀæĻĘ╝ĒĢĀ ņłś ņ׳ļŖö TPĻ░Ć ļŗżņłśņØ┤ĻĖ░ ļĢīļ¼ĖņŚÉ ņĄ£ņåīĻ▒░ļ”¼ Ļ▓ĮļĪ£Ļ░Ć ļŗżņ¢æĒĢĀ ņłś ļ░¢ņŚÉ ņŚåļŗż.
Step 2 : Ēøäļ│┤ļĀłņØĖļōż ņżæņŚÉņä£ ņ¦äņ×ģĻ│ĄĻ░äņØś ņŚ¼ņ£ĀĻ░Ć ņŚåļŖö ļĀłņØĖ ļōżņØä ņĀ£ņÖĖĒĢ£ļŗż(Fig. 12ņŚÉņä£ļŖö ļĀłņØĖ 1ņØä ņĀ£ņÖĖĒĢ£ļŗż). ņ¦äņ×ģĒĢĀ ņłś ņ׳ļŖö Ēøäļ│┤ļĀłņØĖņØ┤ ņŚåļŖö Ļ▓ĮņÜ░ņŚÉļŖö Ļ░ü ļĀłņØĖņŚÉ ļīĆĒĢ£ ļīĆĻĖ░ Ēöīļ×½ņ╣┤ ļ”¼ņŖżĒŖĖļź╝ Ļ▓ĆņāēĒĢ£ Ēøä Ļ░ĆĻ╣īņÜ┤ ņłśĒÅēļĀłņØ╝ ņżæņŚÉņä£ ļīĆĻĖ░ Ēöīļ×½ņ╣┤Ļ░Ć ņĀüņØĆ ļĀłņØĖņØä Ēøäļ│┤ļĀłņØĖņ£╝ļĪ£ ņäĀņĀĢĒĢśņŚ¼ ļīĆĻĖ░ļ”¼ņŖżĒŖĖņŚÉ ņś¼ļ”░ļŗż.
Step 3 : ņäĀņĀĢļÉ£ ļĀłņØĖņØś ļīĆĻĖ░ļ”¼ņŖżĒŖĖņŚÉ ņś¼ļĀżņ¦ä ļÆż ņ¦äņ×ģĻ│ĄĻ░ä ņØ┤ ĒÖĢļ│┤ļÉśļ®┤ ņ▓½ ļ▓łņ¦Ė ļīĆĻĖ░ Ēöīļ×½ņ╣┤Ļ░Ć ņäĀņĀĢļÉ£ ļĀłņØĖņ£╝ļĪ£ ņØ┤ļÅÖĒĢ£ ļŗż(Fig. 12ņŚÉņä£ ļĀłņØĖ 2Ļ░Ć ņäĀņĀĢļÉ£ļŗż). Ļ░Ćņן Ļ░ĆĻ╣īņØ┤ ņ׳ļŖö ļĀłņØĖņØä ņäĀņĀĢĒĢśļŖö ņØ┤ņ£ĀļŖö ņłśņ¦üļĀłņØ╝ņØś ņé¼ņÜ®ņŗ£Ļ░äņØ┤ Ļ░Ćņן ņ¦¦ĻĖ░ ļĢīļ¼ĖņØ┤ļŗż.
 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






