AIS 데이터 분석을 통한 이상 거동 선박의 식별에 관한 연구
Detection of Ship Movement Anomaly using AIS Data: A Study
Article information
Abstract
최근 해상교통량이 증가하고 선박교통 관제구역이 확대됨에 따라 관제사의 업무 부하가 증가하고 있으며, 이로 인해 교통량이 급 증하는 경우 관제사가 위험을 인지하지 못하는 상황도 발생하게 된다. 이러한 배경에서 본 논문에서는 관제 업무의 지원을 위해 이상 거동 선박을 자동으로 식별하는 방법을 제안한다. 본 방법은 누적된 AIS 데이터를 이용하여 관제구역 내의 통항 패턴을 학습하고, 학습된 모델과 의 비교를 통해 이상치를 계산하여 이상 거동 선박을 식별한다. 특히, 선박의 거동 상태에 대한 분류 정보가 없더라도 비지도 학습법을 기반 으로 항적 데이터를 자동으로 분류하여 통항 패턴을 학습할 수 있으며, 항적의 군집화와 분류 과정을 통해 이상 거동 선박을 실시간으로 식별 할 수 있는 특징을 가진다. 또한, 본 논문에서는 선박운항 시뮬레이터 및 실제 AIS 항적 데이터를 이용한 식별 실험을 수행하였으며, 이를 통 해 선박교통관제 시스템에의 활용 가능성을 고찰하였다.
Trans Abstract
Recently, the Vessel Traffic Service (VTS) coverage has expanded to include coastal areas following the increased attention on vessel traffic safety. However, it has increased the workload on the VTS operators. In some cases, when the traffic volume increases sharply during the rush hour, the VTS operator may not be aware of the risks. Therefore, in this paper, we proposed a new method to recognize ship movement anomalies automatically to support the VTS operator’s decision-making. The proposed method generated traffic pattern model without any category information using the unsupervised learning algorithm.. The anomaly score can be calculated by classification and comparison of the trained model. Finally, we reviewed the experimental results using a ship-handling simulator and the actual trajectory data to verify the feasibility of the proposed method.
1 서 론
선박교통관제시스템(VTS, Vessel Traffic Service)은 항만 혹은 연안을 항해하는 선박의 안전을 목적으로 현재 전국의 주요 항만에 설치되어 운영 중이다. VTS는 주로 AIS(Automatic Identification System)와 RADAR를 이용하여 관제구역 내의 해상교통 상황을 모니터링 하고, 운항 안전을 위 한 정보를 제공하는 역할을 수행한다. 특히, AIS 데이터에는 선 박의 위치 정보뿐만 아니라 항해와 관련된 부가 정보가 포함되 어 있어서 선박교통관제의 필수 구성 요소로 활용되고 있다.
한편, 항만의 교통량이 증가하고 연안 항해 선박에 대한 교 통관제의 필요성이 요구되면서 관제구역이 점차 확대되는 추 세이며, 이에 따라 관제사의 업무 부하도 함께 증가하고 있다. 일반적으로 하나의 관제구역은 다시 여러 개의 섹터로 구분되 고 각 섹터별로 관제사가 배정되어 운영된다. 관제섹터는 항 만의 특성과 교통량 등을 고려하여 효율적인 관제가 가능하도 록 설정하고 있지만, 관제 대상 선박이 급격하게 많아지는 교 통 혼잡 시간대의 경우 관제사의 업무 부하가 증가함에 따라 위험을 인지하지 못하는 상황이 발생하기도 한다(Park et al., 2014). 특히, 관제구역 내의 이상 거동 선박은 많은 사고 위험 을 가지고 있지만, 이를 정량적으로 정의하기가 매우 어려워 서 관제사의 경험에만 의존하여 관제 업무를 수행하고 있다. 물론, 관제 콘솔에는 주의가 필요한 영역을 설정하거나, 일정 한 조건에 경보가 발생하도록 하는 의사결정지원도구(DST, Decision Support Tools)들을 포함하고 있으며, 국제항로표지 협회(IALA)에서도 이러한 기능의 활용 가이드라인을 제시하 고 있다(IALA, 2014). 그러나 이러한 기능은 설정이 복잡하고, 경보가 너무 잦아 관제 업무에 오히려 방해가 되기도 하여 널 리 사용되지 못하고 있는 실정이며, 보다 현실적이고 지능적 인 관제 지원기능의 개발이 필요한 상황이다.
이에, 본 논문에서는 인공지능의 한 분야인 기계학습 (machine learning) 기술을 이용하여 이상 거동 선박을 자동 으로 식별하는 방법을 제안하며, 시뮬레이션 데이터와 실제 항적 데이터를 이용한 실험 결과를 통해 선박교통 관제시스템 에의 활용 가능성을 고찰하고자한다.
2 선행 연구 분석
서론에서 언급한 바와 같이, 관제사의 업무 부하 증가로 인 한 오류를 줄이고자 관제 업무를 자동화하고 관제사의 의사결 정을 지원하기 위한 다양한 연구가 진행되고 있다. 그 중 선박 간의 충돌 위험도를 기반으로 하는 의사결정 지원 시스템에 대한 연구가 많은 비중을 차지하고 있으며, 충돌 위험도를 정 량적으로 평가하기 위해 퍼지 알고리즘을 적용하기도 하고 (Son et al., 2009), 선박 운항자의 관점에서 느끼는 위험도를 바탕으로 평가 모델을 구현한 사례도 있다(Park et al., 2015). 그러나 이러한 방법들은 충돌 위험 분석에만 최적화되어 있어 서 해상교통 상황을 종합적으로 분석하는데 한계가 있다.
한편, 현재 시공간의 상태를 이해하고, 이를 토대로 가까운 미래를 예측하는 것을 상황인식(situation awareness)이라고 정의하며(Endsley et al., 1994), 최근 항해 및 선박교통관제 업무를 체계화하고 인적 오류(human error)를 줄이기 위한 목 적으로 적용이 시도되고 있다. 해상교통 분야에서의 상황인식 을 위한 첫 번째 단계는 이상 거동 선박을 식별하는 것이다. 이상 거동 선박은 관제구역을 운항하는 선박들 중 사고 가능 성이 높은 선박으로, 항로상 정지, 항로 이탈, 제한 구역 접근 등 너무 다양한 조건에서 발생하기 때문에 이를 정량적으로 정의하기가 어렵다.
이상 거동 선박을 식별하기 위한 연구는 크게 세 가지로 구 분될 수 있다. 첫 번째는 확률 모델을 기반으로 하는 통계학적 접근 방법이다. 정상 거동 데이터는 높은 발생 확률을 가진다 는 가정을 설정하고, 데이터의 발생 확률 분포를 추정하여 이 상 거동 데이터를 식별하는 방법이다(Kowalska et al., 2012; Smith et al., 2014). 이와 다르게 데이터 군집화 알고리즘 혹 은 데이터 마이닝 방법을 적용하여 이상 거동 선박을 식별하 는 기계학습적 접근방법도 다양하게 시도되고 있다(Rong et al., 2017). 한편, 실제 항만의 규정과 항해 규칙들을 온톨로지 모델로 구성하고 이를 통해 이상 거동 선박을 식별하고자 하 는 지식기반(knowledge-based) 방법들도 연구된 바 있다 (Brax et al., 2012).
그러나 대부분의 이상 거동 선박 식별 방법은 데이터의 확 장성 문제를 해결해야만 한다. 즉, 성능 향상을 위해서는 대용 량의 데이터를 이용하여 모델링해야 하지만, 모델 데이터의 용량이 증가할수록 처리 시간이 기하급수적으로 증가하는 문 제점이 있다. 또한, 이상 선박 식별을 위한 처리에도 지연이 발생하여 실시간 시스템에 적용하는데 무리가 있으며, 실제로 제안된 방법들은 대부분 오프라인 환경에서 운영되고 있다. 이러한 문제점을 해결하기 위해 하둡(Hadoop)의 맵리듀스 (MapReduce)와 같은 빅데이터 처리 방법을 적용하여 처리시 간을 줄이는 방향으로 연구가 진행되고 있다(Canzzanti et al., 2015).
3 데이터 특징 분석
기계학습을 이용한 데이터 분석 기술은 대용량의 데이터로 부터 수학적인 패턴을 학습하는 기술이며, 데이터의 특징에 따라 분석 방법 및 모델의 구성이 달라지기 때문에, 분석 작업 을 수행하기 전 대상에 대한 특징 분석이 선행되어야 한다.
본 연구에서는 이상 거동 선박의 식별을 위해 AIS로부터 수신된 항적 자료를 학습 데이터로 사용한다. AIS 데이터는 선박의 위치 정보뿐만 아니라 항해와 관련된 다양한 정보가 함께 포함되어 있으며, 관제 구역별로 매일 수천만 건 이상의 데이터가 수신되는 대용량의 데이터이다. AIS 데이터 중 선박 의 항적 데이터는 이동 속도에 따라 매 2초에서 3분 주기로 수신되며, 이 데이터를 누적하여 선박별 과거 이동 경로를 파 악할 수 있다. 선박의 위치 정보는 WGS-84 측지계 방식의 경 위도 좌표로 표시되며, 해당 위치에서의 속도와 침로 정보가 실수형의 연속적인 값을 가진다. 또한, 선박에 따라 데이터의 수신 주기가 다르기 때문에 일정한 시간 간격에 따라 항적 데 이터를 보간하는 시간 정규화 작업이 필요하며, 특정 선박에 대한 분석이 필요한 경우 선박식별부호(MMSI, Maritime Mobile Service Identification)를 이용하여 항적 데이터를 분 류하는 작업도 추가적으로 필요하다.
한편, 일반적인 기계학습 시스템은 입력과 출력의 쌍으로 구성된 학습 데이터를 사용하며, 이를 지도학습(supervisedlearning) 방법이라고 한다. 즉, 선박의 이상 거동 식별에 지도 학습 방법을 적용하기 위해서는 각 선박의 항적 데이터와 이 를 정상 및 이상 상태로 분류한 학습 데이터의 쌍이 반드시 필요하다. 그러나 수신된 항적 데이터는 대부분 정상 상태이 고, 상태를 분류하는 항목이 없으며, 학습을 위해 대용량 항적 데이터의 상태를 수동으로 분류하는 것도 어려운 상황이다. 이렇게 학습 데이터에 분류 항목이 포함되어 있지 않은 경우 학습 데이터 자체의 특징을 분석하여 이를 분류하는 비지도 학습(unsupervised learning)법을 사용한다.
본 연구의 분석 대상인 항적 데이터는 시간에 따라 누적된 대용량의 항적 데이터이며, 정상 데이터가 학습 데이터의 대 부분을 구성하고 있고, 정상 및 이상 상태를 분류하는 항목이 없는 특징을 가지고 있다. 이에 본 연구에서는 비지도 학습법 을 기반으로 누적된 항적 데이터를 군집화(clustering)하고, 이 를 통해 학습 모델을 구축한 후, 구축된 모델과의 비교를 통해 이상 거동 선박을 식별하는 방법을 적용하였다.
4 이상 거동 식별 모델
4.1 모델 개요
본 논문에서는 학습된 항적 모델과 다른 패턴의 항적은 이 상 거동 상태일 확률이 높다고 가정하고, 이를 효과적으로 식 별하기 위한 방법을 제안한다. 제안하는 방법은 Fig. 1에서와 같이 크게 세 단계로 구성된다.
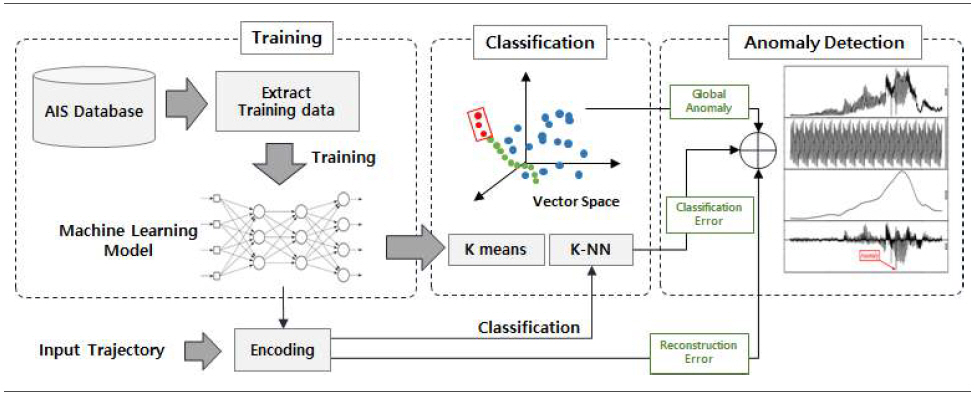
Concept diagram of ship movement anomaly detection model
식별 모델의 첫 번째 단계는 AIS 데이터베이스로부터 학습 데이터를 추출하고, 이를 통해 기계학습 모델을 학습하는 단 계이다. 학습에 사용되는 데이터는 상태 분류 정보가 포함되 지 않은 항적 데이터이며, 비지도 학습 방법을 이용하여 데이 터의 자체 특성을 압축한 저차원읜 벡터공간을 생성하게 된다.
한편, 입력된 항적 데이터는 벡터공간에 다시 투영되어 유 사한 특징을 가지는 데이터별로 군집화(clustering) 된다.
마지막 단계에서는 새롭게 입력되는 항적 데이터를 벡터공 간에 투영한 후, 학습된 상태 그룹으로 분류하여 이상치 (anomaly score)를 계산하게 되고 이를 기준으로 이상 거동 상태를 식별하게 된다. 이상치는 각 단계에서 계산된 학습 모 델과의 오차 값을 모두 합산한 값이며, 오차 값은 전역 이상치 (global anomaly), 분류 오차(classification error), 복원 오차 (reconstruction error) 로 구성된다.
4.2 기계학습 모델
앞서 언급한 바와 같이, 항적 데이터는 정상 및 이상 상태 를 분류하는 분류 항목이 없으며, 대용량의 특성을 가지고 있 다. 따라서 본 연구에서는 이상 거동 식별을 위해 대표적인 비 지도 학습 방법인 오토인코더(autoencoder) 모델을 적용하였다.
오토인코더 모델은 신경망(neural network)을 기반으로 하 는 기계학습 모델이며, 분류 항목이 없는 학습 데이터를 이용 하여 데이터 자체의 연관성을 파악하고 이를 잘 표현하는 저 차원의 벡터공간을 생성할 수 있는 특징을 가진다. 본 모델은 분류 항목이 없는 대신 출력과 입력이 동일한 입력-입력의 쌍 으로 구성된 데이터를 이용하여 학습하며, 학습을 통해 얻어 진 벡터공간은 입력 데이터의 의미를 함축하게 된다. 즉, 벡터 공간에서는 의미적으로 유사한 패턴을 가진 데이터를 가까운 거리에 배치하는 특징이 있다. 이와 같은 특징을 이용하여 선 박의 정상 및 이상 거동 상태를 구분할 수 있으며, 세부적으로 는 선박의 입항 혹은 출항과 같은 의미적인 분류도 가능하게 된다.
한편, 학습 모델의 입력은 데이터의 특성과 학습 과정의 효 율성을 모두 고려해야하며, 본 논문에서는 AIS 데이터베이스 로부터 추출된 선박별 항적 데이터를 바탕으로 총 48차원의 데이터를 생성하여 사용한다.
학습 모델은 Fig. 2와 같이 입력 및 출력 층과 5개의 은닉 층을 가진 완전 연결(fully connected) 네트워크로 구성되며, 최종 학습 결과 30차원의 벡터공간을 구성할 수 있다.

Architecture of the autoencoder
모델의 입출력 데이터는 수신된 항적 데이터를 일정한 시 간 간격(30초)으로 선형 보간 한 후, 식 (1)과 같이 6개 항적을 하나로 묶어서 총 3분간의 항적 데이터로 구성한다.
where, La : latitude, Lo : longitude,
S : speed of ground
C : course of ground
4.3 항적 군집화
모델 학습의 다음 단계는 학습을 통해 생성된 벡터공간에 항적 데이터를 다시 투영하여 유사한 특징을 가지는 데이터를 그룹별로 군집화(clustering) 한다. 본 논문에서는 군집화를 위 해 k-means 알고리즘을 사용하며, 항적 데이터를 여러 개의 상태 그룹으로 분류하게 된다. k-means 알고리즘은 각 그룹 과의 거리 차이 값의 분산을 최소화하는 방식으로 데이터를 군집화 하는 방법이다. 이 방법은 분류하고자 하는 그룹의 수 (k)를 미리 결정해야 하며, 본 논문에서는 항적의 의미적인 분류임을 고려하여 20개의 상태 그룹으로 분류하였다. 일반적 으로 군집화 알고리즘은 분할하는 그룹의 수가 매우 중요한 의미를 가지지만, 제안하는 방법은 각 그룹으로 분류될 확률 값만을 사용하기 때문에, 상태 그룹의 수는 크게 중요하지 않 게 된다. 다만, 너무 많은 상태 그룹으로 세분하는 경우 시스 템의 성능을 저하시킬 수도 있고, 학습 데이터가 충분히 많지 않은 경우 이상치를 판단하기 어려울 수도 있다. 한편, 학습에 사용된 데이터의 대부분이 정상 거동 항적이지만, 이상 거동 데이터와 AIS의 자체 오류 데이터도 일부 포함되어 있다. 따 라서 군집화 결과 상대적으로 낮은 비중을 차지하는 상태 그 룹은 이상 데이터일 확률이 높기 때문에 이를 제거하였다.
4.4 항적 분류
분류 단계에서는 구축된 학습 모델을 바탕으로 새롭게 입 력되는 항적 데이터를 벡터공간에 투영한 뒤, 어떤 상태 그룹 으로 분류되는지를 결정하게 된다. 본 논문에서는 상태 그룹 분류를 위해서 k-NN(k Nearest Neighbor) 알고리즘을 적용 하였다. k-NN 알고리즘은 학습 데이터 중 가장 유사한 k개를 선별하고, 이를 이용하여 각 그룹별로 분류될 확률 값을 토대 로 데이터를 분류하는 방법이며, 유사도 평가를 위한 다양한 방법이 사용될 수 있지만, 본 논문에서는 벡터공간 내의 유클 리디언(euclidean) 거리 정보를 사용하였다.
4.5 이상 거동 항적 식별
식별 단계에서는 입력된 항적 데이터의 정상 거동 여부를 최종적으로 결정하게 되는데, 본 논문에서는 다음과 같이 이 상치(anomaly score)를 정의하고, 이를 기준으로 이상 거동 항적을 식별하게 된다. 이상치는 정상 거동 항적 모델과의 차 이를 정량화한 수치로 다음 세 종류의 오차를 합산하여 계산 된다. 첫 번째는 오토인코더 모델에서 입력-출력간의 복원 오 차 값이다. 오토인코더 모델은 입력과 출력이 같은 신경망 모 델이다. 따라서 학습된 항적을 입력하면 입력과 출력의 차이 가 작으며, 그렇지 않은 경우 큰 차이를 보이게 되는 특징이 있다. 두 번째는 인코딩 된 벡터공간에서의 전역 이상치이다. 이는 학습 모델과의 유사도를 의미하며, 이상점(outlier) 탐지 알고리즘인 Isolation Forest(Liu et al., 2008)를 사용하였다. 세 번째 오차 항목은 상태 그룹으로 분류될 확률 값이며, 입력 된 항적이 미리 분류된 그룹으로 얼마나 잘 분류되는지를 나 타낸다. 이와 같이 각 단계에서 계산된 오차 값을 모두 합산하 여 식 (4)과 같이 이상치를 정의하며, 이상치가 임계치를 벗어 나는 경우 이상 거동 상태로 식별하게 된다.
where, ER : Reconstruction Error
EG : Global Anomaly
EC : Classification Error
5 실험 및 고찰
본 논문에서 제안하는 이상 거동 식별 모델을 검증하기 위 해 실 해역 데이터를 바탕으로 실험을 수행하였다. 실험 대상 항만은 목포항이며, 목포 선박교통관제시스템에서 수집된 6개 월간의 AIS 데이터를 학습에 사용하였다. 분석의 범위는 VTS 관제구역을 고려하여 Fig. 3과 같이 설정하였으며, 데이 터의 정제 과정을 거친 후 임의로 선정된 약 1억 건의 항적 데이터를 학습 데이터로 사용하였다.
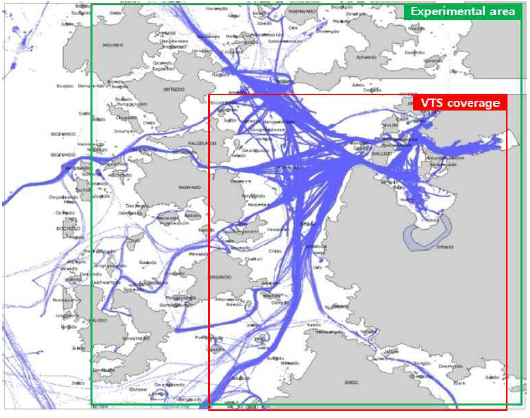
Experimental area (Mokpo harbor)
학습이 완료된 벡터공간에 투영된 항적 데이터를 20개의 상태 그룹으로 분류하였으며, Fig. 4에서와 같이 각 그룹은 입 항, 출항, 묘박 등의 의미적으로 유사한 특징을 보였다. 또한, 상대적으로 규모가 작은 그룹은 오류가 포함되었을 확률이 높 으므로 데이터의 신뢰성 향상을 위해 하위 10%의 데이터를 제거하였다.
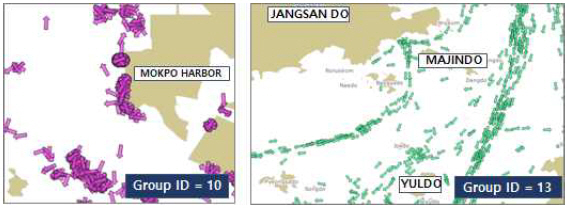
Examples of trajectory classification
한편, 학습 데이터에 포함되지 않은 이상 거동 항적의 테스 트를 위해 선박운항시뮬레이터를 이용한 가상 항적을 생성하 여 실험에 사용하였다. 가상 항적은 실제 항적과는 달리 이상 거동 여부를 명확하게 정의할 수 있는 장점이 있으며, 본 실험 에서는 Fig. 5와 같이 항로상 정지, 항로 이탈의 시나리오에 대해 실험을 수행하였다. 실험에 사용된 시나리오의 세부 사 항은 Table 1과 같다.
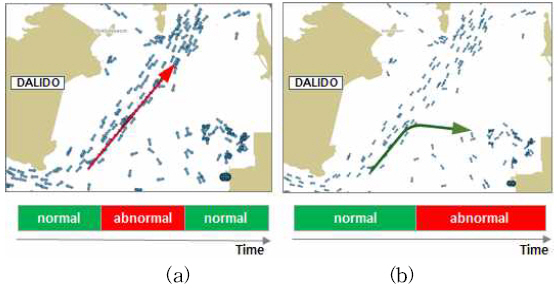
Simulation scenarios; (a) stop on the route, (b) breakaway from route

Details of simulation scenarios
첫 번째 시나리오는 대상 선박이 정상적으로 항로를 운항 하던 중 엔진이 정지하여 속도가 줄어들고, 다시 가속하여 정 상 운항으로 복귀하는 시나리오이다. Fig. 6의 (a)와 같이 운 항 속도가 점차 줄어드는 구간에서 이상치가 증가하였으며, 정상 속도로 복귀한 후에는 이상치가 다시 감소하는 것을 확 인할 수 있었다. 또한, 항로 이탈 시나리오에서는 Fig. 6의 (b) 와 같이 우현 변침에 의해 침로 값이 변하고, 이에 따라 이상 치도 급격하게 증가하였으며, 이를 이용하여 항로 이탈로 인 한 이상 거동 상태를 식별할 수 있었다. 가상 항적 데이터를 이용한 실험 이외에 실제 사고 항적 데이터를 이용한 실험도 수행하였다. 실험에 사용된 사례는 관제구역 내에서 발생한 충돌 사고로 Fig. 7에서와 같이 북항에서 출항하던 A 선박이 시계불량으로 B 선박을 조기에 발견하지 못하고 충돌한 사례 이다. 사고 데이터는 충돌 사고 발생 후 자선의 속도가 급격히 줄어들고, 정상 항로에서 벗어나는 등 이상 거동 항적을 포함 하고 있으며, 식별 테스트 결과, Fig. 8과 같이 단순히 침로나 속도의 변화에 따라 이상치가 변하는 것이 아니라 충돌 발생 시점에 이상치가 급격히 증가하는 것을 확인할 수 있었다.

Anomaly scores in simulation tests; (a) stop on the route, (b) breakaway from route
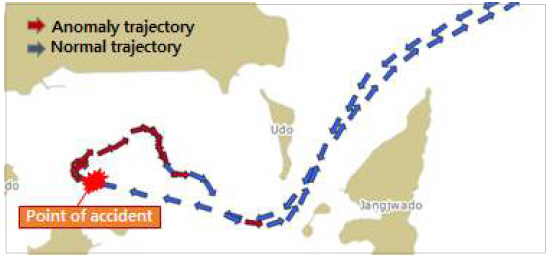
Trajectory of real accident
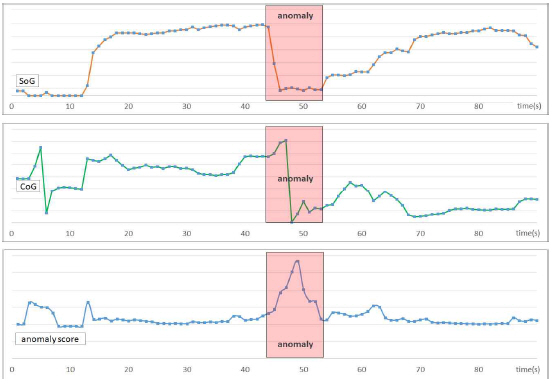
Anomaly score in actual trajectory
6 결 론
본 논문에서는 관제사의 업무 지원을 위해 관제구역 내 이 상 거동 선박을 자동으로 식별하기 위한 방법을 제안하였다. 이는 기존의 방법과는 달리 비지도 학습법을 기반으로 분류 항목이 없는 AIS 항적 데이터를 자동으로 분류하고, 학습된 항적 모델과의 비교를 통해 이상 거동 선박을 식별하는 특징 을 가지고 있다. 구현된 모델은 시뮬레이션을 통한 가상 항적 데이터와 실제 AIS 항적 데이터를 이용하여 식별 실험을 수 행하였으며, 이를 통해 활용 가능성을 확인하였다. 그러나 향 후 실시간 AIS 데이터를 적용한 성능 검증이 필요하며, 선박 간 충돌 상황을 분석하기 위한 추가적인 모델링 작업도 필요 할 것으로 판단된다.
최근 많은 이슈가 되고 있는 기계학습은 선박교통관제와 같은 복합적인 추론이 요구되는 분야에 매우 적합한 기술이 며, 학습 데이터의 양과 질에 따라 시스템의 성능이 좌우된다. 이러한 이유에서 국내 선박교통관제센터에서 수집되는 관제 정보는 향후 해양 분야의 기술 혁신을 가져올 기반이 될 것으 로 사료된다. 이에 관제 센터에서 수집되는 다양한 정보들을 체계적으로 관리할 수 있는 시스템이 필수적이며, 이를 위한 정책적인 지원도 뒤따라야 할 것이다. 앞으로 더욱 많은 연구 개발을 통해 인공지능 기술이 해양사고 방지에 크게 기여할 수 있기를 기대한다.
후 기
본 연구는 한국해양과학기술원 부설 선박해양플랜트연구소 의 주요연구사업 “해양사고 분석 및 재현 시뮬레이션 핵심기술 개발–2단계(2/3)[PES9350]”의 연구결과 중 일부임을 밝힌다.