ýäť Űíá
ýőĄÝŚśý׹Ű╣ä
2.1. ۬ĘÝśĽýäá ýáťýŤÉ

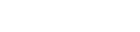
2.2. ŰčČŰŹö Ű░Ć ÝöäŰíťÝÄáŰčČ
2.3. ý×Éýťá ÝĽşýú╝ ۬ĘÝśĽýäá ŕÁČýä▒
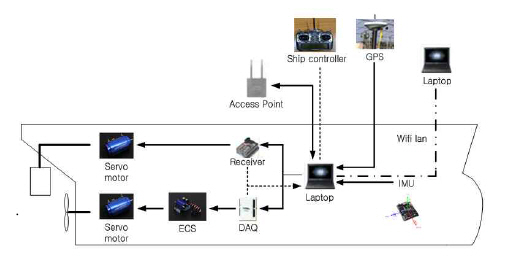
2.4. GPS
۬ĘÝśĽýőĄÝŚś
3.1. ýőĄÝŚśýí░ŕ▒┤ Ű░Ć Ű░ęŰ▓Ľ
Table 3
| Test 1 | Test 2 | Test 3 | Test 4 | |
| GM (cm) | 4.0 | 1.5 | 0.9 | 0.3 |
| Kzz | L/4 | L/4 | L/4 | L/4 |
| Draft (m) | 0.135 | 0.135 | 0.135 | 0.135 |
| Froude No. | 0.164 | 0.164 | 0.164 | 0.164 |
| Displacement (m3) | 186.17 | 186.17 | 186.17 | 186.17 |
3.2. ýőĄÝŚśŕ▓░ŕ│╝
3.2.1. ýäáÝÜî Ű░śŕ▓Ż ŰÂäýäŁ
Table 4
| No. Test | GM [m] | Advance [m] | Tactical diameter [m] | |
| Model ship | Real ship | |||
|---|---|---|---|---|
| Test 1 | 0.040 | 4.0 | 3.43L | 2.78L |
| Test 2 | 0.015 | 1.5 | 3.28L | 2.50L |
| Test 3 | 0.009 | 0.9 | 3.03L | 2.25L |
| Test 4 | 0.003 | 0.3 | 2.90L | 2.12L |
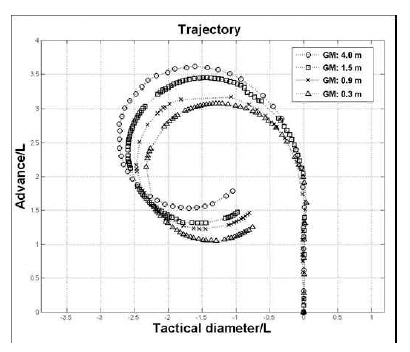
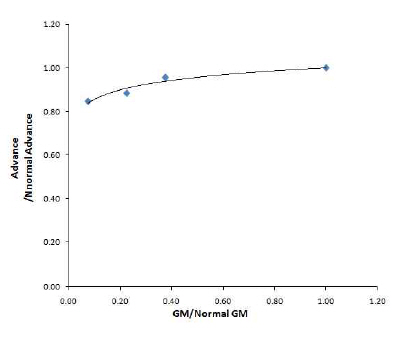
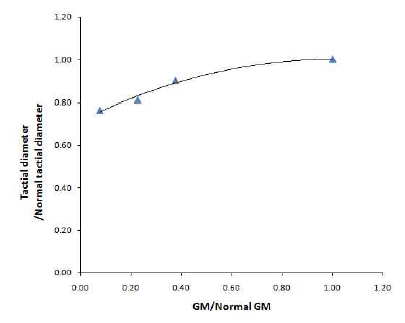
Table 5
| Type of trend | R2 | Numerical expression |
| Linear | 0.83 |
|
| Log | 0.94 |
|
| Polynomial | 0.97 |
|
Table 6
| Type of trend | R2 | Numerical expression |
| Linear | 0.93 |
|
| Log | 0.94 |
|
| Polynomial | 0.98 |
|
3.2.2. ýäáÝÜî ýőť ýÁťŰîÇ ÝÜíŕ▓ŻýéČ ŰÂäýäŁ
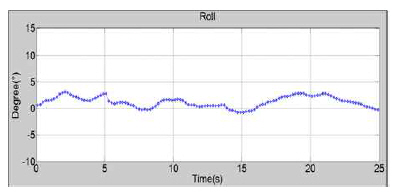
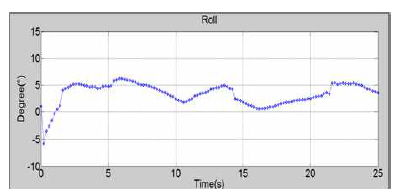
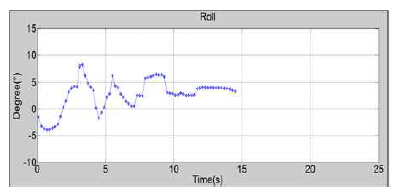
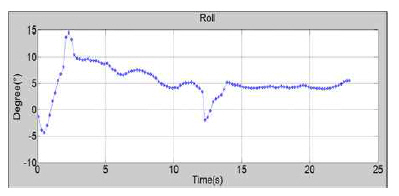
Table 7
| No. Test | GM[m] | Degree[┬░] | |
| Model ship | Real ship | ||
| Test 1 | 0.040 | 4.0 | 2.8 |
| Test 2 | 0.015 | 1.5 | 6.2 |
| Test 3 | 0.009 | 0.9 | 8.2 |
| Test 4 | 0.003 | 0.3 | 14.5 |
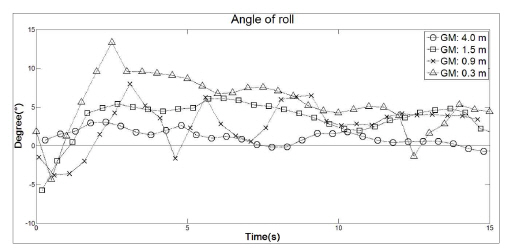
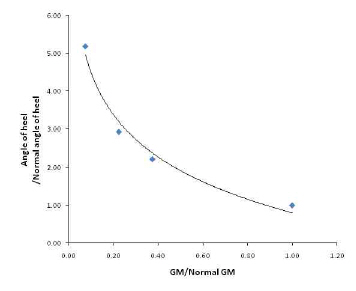
Table 8
| Type of trend | R2 | Numerical expression |
| Linear | 0.76 |
|
| Log | 0.98 |
|
| Polynomial | 0.98 |
|
ŕ▓░ Űíá
-
1. GM ŕ░ÉýćîýŚÉ Űö░ŰąŞ ýäáÝÜîŰ░śŕ▓ŻýŁś Ű│ÇÝÖöŰą╝ ŰÂäýäŁÝĽśýśÇŰőĄ.
ÔĹá GM ŕ░Éýćî Űö░ŰŁ╝ ýäáÝÜîŰ░śŕ▓ŻýŁś ýäáÝÜîýóůŕ▒░ Ű░Ć ýáäýłáŰ░śŕ▓ŻŰĆä ŕ░É ýćîÝĽśýśÇŰőĄ.
ÔĹí GMýŁś ŕ░ÉýćîýťĘ ŰîÇŰ╣ä ýäáÝÜîýóůŕ▒░ Ű░Ć ýáäýłáŰ░śŕ▓ŻýŁś ŕ░ÉýćîýťĘ ýÂö ýäŞŰą╝ ýäáÝśĽ, ŰíťŕĚŞ Ű░Ć 2ý░Ę ŰőĄÝĽşýőŁýŁś ÝśĽÝâťŰíť ŰÂäýäŁÝĽť ŕ▓░ŕ│╝ ŰĹÉ ŕ░ÇýžÇ ۬ĘŰĹÉ 2ý░Ę ŰőĄÝĽşýőŁýŚÉ ŕ░Çŕ╣îýÜ┤ ŕ▓░ŕ│╝Űą╝ ŰéśÝâÇŰé┤ýŚłŰőĄ.
ÔĹó ýŁ┤Űą╝ ÝćÁÝĽśýŚČ ýäáŰ░ĽýŁś GM ŕ░ÉýćîýťĘýŚÉ Űö░ŰąŞ ýäáÝÜî Ű░śŕ▓Żŕ░Éýćî ýŁś ŕ░ťŰ×ÁýáüýŁŞ ýÂöýἠýőŁýŁä 2ý░Ę ŰőĄÝĽşýőŁýŁś ÝĽĘýłśŰíť ýáťýőťÝĽśýśÇŰőĄ.
-
2. GM ŕ░ÉýćîýŚÉ Űö░ŰąŞ ýí░ÝâÇýŚÉ ýŁśÝĽť ýÁťŰîÇ ÝÜíŕ▓ŻýéČŕ░üŰĆä Ű│ÇÝÖöŰą╝ ŰÂä ýäŁÝĽśýśÇŰőĄ.
ÔĹá GMýŁ┤ ŕ░ÉýćîÝĽśŰę┤, ÝÜíŕ▓ŻýéČ ŕ░üŰĆä ýŽŁŰîÇ ýÂöýŁ┤ŰŐö ýäáÝśĽýáü ýŽŁŰîÇ ŕ░Ç ýĽäŰőî 2ý░Ę ŰőĄÝĽşýőŁ Ű░Ć ŰíťŕĚŞ ÝśĽÝâťŰíť ÝüČŕ▓î ýŽŁŰîÇÝĽśŕ│á ý׳ŰŐö ŕ▓âýŁä ÝÖĽýŁŞÝĽśýśÇŰőĄ.
ÔĹí ýŁ┤Űą╝ ÝćÁÝĽśýŚČ ŕ░ü ýäáŰ░ĽýŁś GM ŕ░ÉýćîýťĘýŚÉ Űö░ŰąŞ ýí░ÝâÇýŚÉ ýŁśÝĽť ýÁťŰîÇ ÝÜíŕ▓ŻýéČŰą╝ ýÂöýáĽÝĽśŰŐö ŕ░ťŰ×ÁýáüýŁŞ ýÂöýἠýőŁýŁä 2ý░Ę ŰőĄÝĽşýőŁýŁś ÝĽĘýłśŰíť ýáťýőťÝĽśýśÇŰőĄ.
3. GMýŁ┤ ŕ░ÉýćîÝĽśŰę┤ ýäáÝÜî ýőť ýäáÝÜîŰ░śŕ▓ŻýŁ┤ ŕ░ÉýćîÝĽśŕ│á, ýí░ÝâÇýŚÉ ýŁś ÝĽť ýÁťŰîÇ ÝÜíŕ▓ŻýéČŕ░üŰĆäŕ░Ç ýŽŁŰîÇÝĽťŰőĄ. ŕĚŞ ŰĹśýŁś ŕ░Éýćî Ű░Ć ýŽŁŰîÇ ýÂö ýŁ┤Űą╝ Ű╣äŕÁÉÝĽť ŕ▓░ŕ│╝, GM ŕ░Éýćî Ű╣äýťĘ ŰîÇŰ╣ä ÝÜíŕ▓ŻýéČ ŕ░üŰĆä ýŽŁŕ░Ç ŕ░Ç ýŤöŰô▒Ý׳ ÝüČŰę░, ýäáÝÜîŰ░śŕ▓Ż ŕ░Éýćî ýÂöýŁ┤ŰŐö ŕĚŞýŚÉ Ű╣äÝĽśýŚČ ýáÉýžä ýáüýť╝Űíť ŕ░ÉýćîŰÉśŰŐö ŕ▓âýŁä ÝÖĽýŁŞÝĽśýśÇŰőĄ.
 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






